Uno sciame robotico. Il robot scelto in questo studio è stato il kilobot. Credito:Slavkov et al., Sci. Robot. 3, eaau9178 (2018)
Centinaia di piccoli robot possono lavorare in squadra per creare forme ispirate alla biologia senza un piano generale sottostante, puramente basato sulla comunicazione e il movimento locali. Per realizzare questo, ricercatori dell'EMBL, CRG e Bristol Robotics Laboratory hanno introdotto i principi biologici dell'auto-organizzazione nella robotica a sciame. I risultati sono stati pubblicati in Robotica scientifica .
"Mostriamo che è possibile applicare i concetti di auto-organizzazione della natura alla tecnologia umana come i robot, ", afferma il leader del gruppo EMBL Barcelona James Sharpe. "Questo è affascinante perché la tecnologia è molto fragile rispetto alla robustezza che vediamo nella biologia. Se un componente del motore di un'auto si rompe, di solito si traduce in un'auto non funzionante. Al contrario, quando un elemento in un sistema biologico fallisce, per esempio se una cellula muore inaspettatamente, non compromette l'intero sistema, e di solito verrà sostituito da un'altra cella in seguito. Se potessimo ottenere la stessa auto-organizzazione e autoriparazione nella tecnologia, possiamo consentirgli di diventare molto più utile di quanto non sia ora." Sharpe ha guidato il progetto, avviato presso il Center for Genomic Regulation (CRG) con Sabine Hauert presso l'Università di Bristol.
Formazione della forma come si vede negli sciami di robot
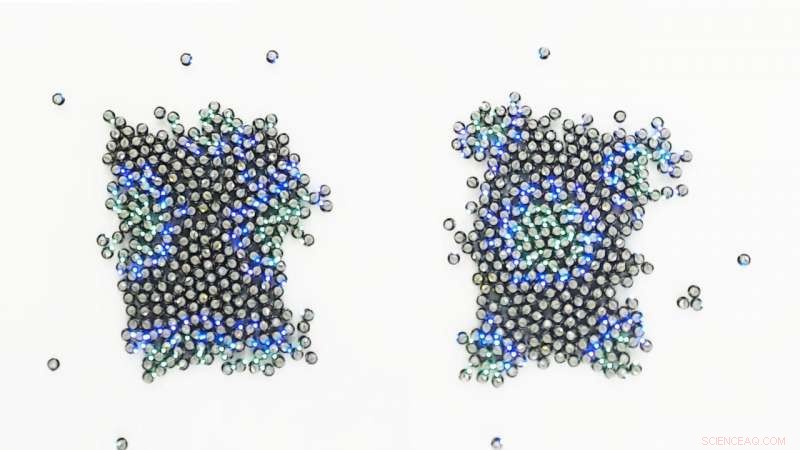
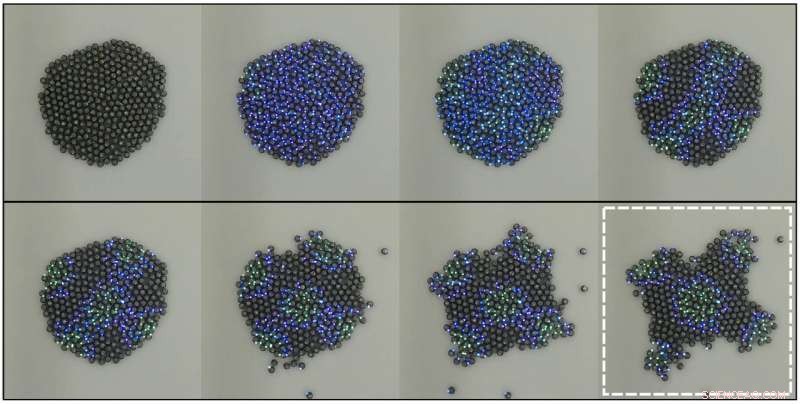
Gli esperimenti completi sono durati in media tre ore e mezza. Ispirato dalla biologia, i robot immagazzinano morfogeni, molecole virtuali che trasportano le informazioni di patterning. I colori segnalano la concentrazione morfogena dei singoli robot:il verde indica valori morfogeni molto elevati, il blu e il viola indicano valori più bassi, e nessun colore indica l'assenza virtuale del morfogeno nel robot. La concentrazione di morfogeno di ciascun robot viene trasmessa ai robot vicini entro un raggio di 10 centimetri. Lo schema generale di macchie che emerge guida il trasferimento dei robot per far crescere sporgenze che si estendono dallo sciame.
Emersione di diverse morfologie di sciami attraverso un modello di diffusione di Turing. Credito:Slavkov et al., Sci. Robot. 3, eaau9178 (2018)
Le regole di Turing
Le uniche informazioni che il team ha installato nei robot delle dimensioni di una moneta erano le regole di base su come interagire con i vicini. Infatti, hanno specificamente programmato i robot nello sciame per agire in modo simile alle cellule di un tessuto. Quelle regole "genetiche" imitano il sistema responsabile dei modelli di Turing osservati in natura, come la disposizione delle dita su una mano o le macchie su un leopardo. In questo modo, il progetto riunisce due delle attrattive di Alan Turing:l'informatica e la formazione di modelli in biologia.
I robot si affidano alla messaggistica a infrarossi per comunicare con i vicini entro un raggio di 10 centimetri. Questo rende i robot simili a cellule biologiche, in quanto anch'essi possono comunicare direttamente solo con altre cellule fisicamente vicine a loro.
Lo sciame forma varie forme spostando i robot da aree con bassa concentrazione di morfogeno ad aree con alta concentrazione di morfogeno, chiamate "punti di Turing", " che porta alla crescita di sporgenze che si estendono dallo sciame. "È bello vedere lo sciame crescere in forme, sembra abbastanza organico. La cosa affascinante è che non esiste un piano generale, queste forme emergono come risultato di semplici interazioni tra i robot. Questo è diverso dal lavoro precedente in cui le forme erano spesso predefinite, "dice Sabine Hauert.

I robot utilizzati durante gli esperimenti. La forma di questo particolare sciame è un'illustrazione fatta a mano della tecnica. Attestazione:AAAS
Lavorare con grandi sciami di robot
È impossibile studiare il comportamento degli sciami con solo un paio di robot. Il team ne ha utilizzati almeno 300 nella maggior parte degli esperimenti. Lavorare con centinaia di minuscoli robot è di per sé una sfida. Sono stati in grado di farlo grazie a una configurazione speciale che consente di interrompere facilmente gli esperimenti, e tutti i robot riprogrammati contemporaneamente usando la luce. I ricercatori hanno condotto oltre 20 esperimenti con grandi sciami, con ogni esperimento che richiede circa tre ore e mezza.
Per di più, proprio come in biologia, le cose spesso andavano male. I robot si sono bloccati, o si è allontanato dallo sciame nella direzione sbagliata. "Questo è il tipo di cose che non accadono nelle simulazioni, ma solo quando fai esperimenti nella vita reale, "dice Ivica Slavkov, che condivide la prima paternità dell'articolo con Daniel Carrillo-Zapata.
Tutti questi dettagli hanno reso il progetto impegnativo. La prima parte del progetto è stata svolta in simulazioni al computer, e la squadra ha impiegato circa tre anni prima che il vero sciame di robot prendesse la sua prima forma. Ma i limiti dei robot hanno anche costretto il team a escogitare soluzioni intelligenti, meccanismi robusti per orchestrare lo schema dello sciame. Prendendo ispirazione dalla formazione della forma in biologia, il team è stato in grado di dimostrare che le forme dei loro robot potevano adattarsi ai danni e all'autoriparazione. La formazione della forma su larga scala dello sciame è molto più affidabile di ciascuno dei piccoli robot; il tutto è maggiore della somma delle parti.
Mentre i ricercatori si sono ispirati alla natura per far crescere le forme dello sciame, l'obiettivo è in definitiva quello di creare grandi sciami di robot per applicazioni del mondo reale. Immagina centinaia o migliaia di minuscoli robot che cambiano formazione per adattarsi a un ambiente disastroso dopo un terremoto o un incendio, o scolpirsi in una struttura 3D dinamica come un ponte temporaneo che potrebbe adattare automaticamente le sue dimensioni e forma per adattarsi a qualsiasi edificio o terreno. "Poiché ci siamo ispirati alla formazione della forma biologica, che è noto per essere auto-organizzato e resistente al fallimento, tali sciami potrebbero continuare a funzionare anche se alcuni robot sono stati danneggiati, " dice Daniel Carrillo-Zapata. C'è ancora molta strada da fare però, prima di vedere sciami simili fuori dal laboratorio.














