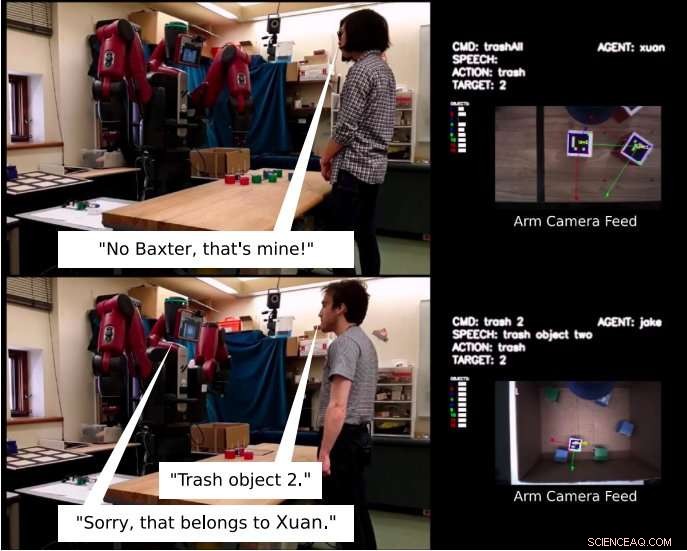
Apprendimento della proprietà tramite l'interazione uomo-robot. In alto:il robot viene arrestato verbalmente a metà dell'azione da Xuan per aver scartato l'oggetto 2. In basso:dopo aver appreso le relazioni di proprietà e i permessi di azione interagendo con Xuan, il robot nega la richiesta di Jake di scartare l'oggetto 2. Credito:Tan, Brawer &Scassellati.
Un team di ricercatori della Yale University ha recentemente sviluppato un sistema robotico in grado di rappresentare, apprendere e inferire relazioni e norme di proprietà. Il loro studio, pre-pubblicato su arXiv, affronta alcune delle complesse sfide associate all'insegnamento delle norme sociali ai robot e a come conformarsi ad esse.
Man mano che i robot diventano più diffusi, è importante che siano in grado di comunicare con gli esseri umani in modo efficace e appropriato. Un aspetto chiave delle interazioni umane è comprendere e comportarsi secondo le norme sociali e morali, poiché ciò promuove una coesistenza positiva con gli altri.
Le norme di proprietà sono un insieme di norme sociali che aiutano a navigare negli ambienti condivisi in modi più rispettosi nei confronti degli altri. Insegnare queste norme ai robot potrebbe migliorare le loro interazioni con gli umani, consentendo loro di distinguere tra strumenti non di proprietà e strumenti di proprietà che sono temporaneamente condivisi con loro.
"Il mio laboratorio di ricerca si concentra sulla costruzione di robot con cui le persone possono interagire facilmente, "Brian Scassellati, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Parte di questo lavoro riguarda il modo in cui possiamo insegnare alle macchine concetti sociali comuni, cose che sono essenziali per noi umani ma che non sempre sono gli argomenti che attirano maggiormente l'attenzione. Comprensione delle proprietà degli oggetti, autorizzazioni, e la dogana è uno di questi argomenti che non ha ricevuto molta attenzione ma sarà fondamentale per il modo in cui le macchine funzionano nelle nostre case, scuole, e uffici».
Nell'approccio ideato da Scassellati, Xuan Tan e Jake Brawer, la proprietà è rappresentata come un grafico delle relazioni probabilistiche tra gli oggetti ei loro proprietari. Questo è combinato con un database di norme basate sui predicati, che vincolano le azioni che il robot è autorizzato a completare utilizzando oggetti di proprietà.
"Una delle sfide in questo lavoro è che alcuni dei modi in cui apprendiamo sulla proprietà sono attraverso l'indicazione di regole esplicite (ad es. 'non prendere i miei strumenti') e altri vengono appresi attraverso l'esperienza, " ha detto Scassellati. "Combinare questi due tipi di apprendimento può essere facile per le persone, ma è molto più impegnativo per i robot."
Il sistema ideato dai ricercatori combina un nuovo algoritmo di apprendimento della norma incrementale che è in grado sia di apprendimento one-shot che di induzione da esempi, con l'inferenza bayesiana delle relazioni di proprietà in risposta a apparenti violazioni delle regole e previsione basata sulla percezione dei probabili proprietari di un oggetto. Insieme, questi componenti consentono al sistema di apprendere norme e relazioni di proprietà applicabili in una varietà di situazioni.
"La chiave del lavoro svolto da Xuan e Jake è stata quella di combinare due diversi tipi di rappresentazione dell'apprendimento automatico, uno che impara da questi espliciti, regole simboliche e uno che impara da piccoli frammenti di esperienza, " Ha spiegato Scassellati. "Far lavorare insieme questi due sistemi è ciò che rende questo impegnativo, e alla fine, ciò che ha reso questo successo."
I ricercatori hanno valutato le prestazioni del loro sistema robotico in una serie di esperimenti simulati e reali. Hanno scoperto che potrebbe completare efficacemente le attività di manipolazione degli oggetti che richiedevano il rispetto di una serie di norme di proprietà, con notevole competenza e flessibilità.
Lo studio condotto da Scassellati e dai suoi colleghi offre un notevole esempio di come i robot possano essere addestrati a inferire e rispettare le norme sociali. Ulteriori ricerche potrebbero applicare costrutti simili ad altre capacità relative alle norme e affrontare situazioni complesse in cui norme o obiettivi diversi sono in conflitto tra loro.
"Stiamo continuando a studiare come costruire robot che interagiscono in modo più naturale con le persone, e questo studio si concentra solo su un aspetto di questo lavoro, " Disse Scassellati.
© 2018 Science X Network