Un team internazionale di ricercatori ha sviluppato un sistema di percezione per robot morbidi ispirato al modo in cui gli esseri umani elaborano le informazioni sui propri corpi nello spazio e in relazione ad altri oggetti e persone. Descrivono il sistema, che include un sistema di motion capture, sensori morbidi, una rete neurale, e un morbido dito robotico, nel numero del 30 gennaio di Robotica scientifica . Credito:Università della California San Diego
Un team internazionale di ricercatori ha sviluppato un sistema di percezione per robot morbidi ispirato al modo in cui gli esseri umani elaborano le informazioni sui propri corpi nello spazio e in relazione ad altri oggetti e persone. Descrivono il sistema, che include un sistema di motion capture, sensori morbidi, una rete neurale, e un morbido dito robotico, nel numero del 30 gennaio di Robotica scientifica .
L'obiettivo finale dei ricercatori è costruire un sistema in grado di prevedere i movimenti e lo stato interno di un robot senza fare affidamento su sensori esterni, proprio come fanno gli umani ogni giorno. nella loro Robotica scientifica carta, mostrano di aver raggiunto questo obiettivo per un morbido dito robotico. Il lavoro ha applicazioni nell'interazione uomo-robot e nella robotica indossabile, così come dispositivi morbidi per correggere disturbi che colpiscono muscoli e ossa.
Il sistema ha lo scopo di imitare i vari componenti necessari agli esseri umani per navigare nel loro ambiente:il sistema di motion capture rappresenta la visione; la rete neurale sostituisce le funzioni cerebrali; i sensori per il tocco; e il dito per il corpo che interagisce con il mondo esterno. Il sistema di motion capture serve per addestrare la rete neurale e può essere scartato una volta completato l'addestramento.
"I vantaggi del nostro approccio sono la capacità di prevedere movimenti e forze complessi che il robot morbido sperimenta (cosa difficile con i metodi tradizionali) e il fatto che può essere applicato a più tipi di attuatori e sensori, " ha detto Michael Tolley, professore di ingegneria meccanica e aerospaziale presso l'Università della California a San Diego e autore senior dell'articolo. "Il nostro metodo include anche sensori ridondanti, che migliora la solidità complessiva delle nostre previsioni".

Il morbido dito robotico fornisce informazioni tattili e di movimento al sistema. Credito:Università della California San Diego
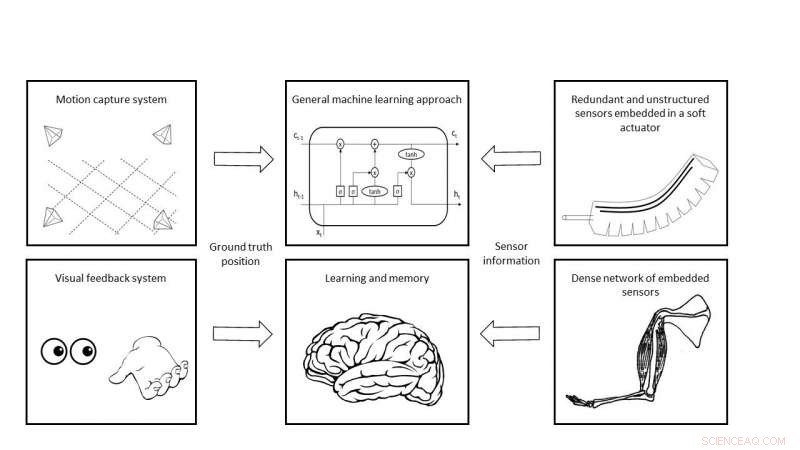
Panoramica dell'architettura modellistica e del suo parallelo con il sistema percettivo umano. Credito:Università della California San Diego
I ricercatori hanno incorporato arbitrariamente sensori di deformazione morbida all'interno del dito robotico morbido, sapendo che sarebbero stati reattivi a un'ampia varietà di movimenti, e ha utilizzato tecniche di apprendimento automatico per interpretare i segnali dei sensori. Questo ha permesso alla squadra, che include ricercatori del Bioinspired Robotics and Design Lab della UC San Diego, prevedere le forze applicate a, e movimenti di, il dito. Questo approccio consentirà ai ricercatori di sviluppare modelli in grado di prevedere le forze e le deformazioni sperimentate dai sistemi robotici morbidi mentre si muovono.
Questo è importante perché le tecniche tradizionalmente utilizzate nella robotica per l'elaborazione dei dati dei sensori non sono in grado di catturare le complesse deformazioni dei sistemi morbidi. Inoltre, le informazioni catturate dai sensori sono ugualmente complesse. Di conseguenza, progettazione del sensore, il posizionamento e la fabbricazione in robot morbidi sono compiti difficili che potrebbero essere notevolmente migliorati se i ricercatori avessero accesso a modelli robusti. Questo è ciò che il team di ricerca spera di fornire.
I prossimi passi includono l'aumento del numero di sensori per imitare meglio le dense capacità di rilevamento della pelle biologica e la chiusura del circuito per il controllo del feedback dell'attuatore.