Questo robot può individuare la fonte di una perdita di etanolo in modo intelligente. Piuttosto che seguire il profumo più forte, il robot inserisce le misurazioni della concentrazione e del flusso d'aria in una complessa equazione differenziale parziale e quindi decide dove si trova la posizione più utile per eseguire un'altra misurazione. Ripetendo questo processo, può trovare una fonte di etanolo in appena una dozzina o due tentativi in un ambiente complesso con più fonti. Attestazione:Reza Khodayi-mehr
Gli ingegneri della Duke University stanno sviluppando un sistema robotico intelligente per individuare i punti caldi dell'inquinamento e le fonti di perdite tossiche. Il loro approccio consente a un robot di incorporare calcoli effettuati al volo per tenere conto dei complessi flussi d'aria di spazi ristretti piuttosto che semplicemente "seguire il suo naso".
"Molti approcci esistenti che impiegano robot per localizzare le fonti di particelle sospese nell'aria si basano su ipotesi istruite ma semplicistiche ispirate alla biologia, o tecniche euristiche, che spingono i robot controvento o per seguire concentrazioni crescenti, " ha detto Michael M. Zavlanos, la Mary Milus Yoh e Harold L. Yoh, Jr. Professore Associato di Ingegneria Meccanica e Scienza dei Materiali alla Duke. "Questi metodi di solito possono localizzare solo una singola fonte in uno spazio aperto, e non possono stimare altri parametri ugualmente importanti come i tassi di rilascio."
Ma in ambienti complessi, questi metodi semplicistici possono mandare i robot a dare la caccia all'oca selvatica in aree in cui le concentrazioni sono aumentate artificialmente dalla fisica dei flussi d'aria, non perché sono la fonte della perdita.
"Se qualcuno sta fumando fuori, non ci vuole molto per trovarli semplicemente seguendo il tuo naso perché non c'è niente che impedisca alle correnti d'aria di essere prevedibili, " disse Wilkins Aquino, il professore Anderson-Rupp di ingegneria meccanica e scienza dei materiali alla Duke. "Ma metti la stessa sigaretta all'interno di un ufficio e improvvisamente diventa molto più difficile a causa delle correnti d'aria irregolari create dai corridoi, angoli e uffici."
In un recente articolo pubblicato online su Transazioni IEEE sulla robotica , Zavlanos, Aquino e nuovo dottorato di ricerca. il laureato Reza Khodayi-mehr sfrutta invece la fisica alla base di questi flussi d'aria per tracciare la fonte di un'emissione in modo più efficiente.
Il loro approccio combina modelli basati sulla fisica del problema di identificazione della sorgente con algoritmi di pianificazione del percorso per la robotica in un ciclo di feedback. I robot effettuano misurazioni delle concentrazioni di contaminanti nell'ambiente e quindi utilizzano queste misurazioni per calcolare in modo incrementale da dove provengono effettivamente le sostanze chimiche.
"La creazione di questi modelli basati sulla fisica richiede la soluzione di equazioni differenziali alle derivate parziali, che è computazionalmente impegnativo e rende la loro applicazione a bordo piccola, robot mobili molto impegnativi, " ha detto Khodayi-mehr. "Abbiamo dovuto creare modelli semplificati per rendere i calcoli più efficienti, che li rende anche meno precisi. È un compromesso impegnativo".
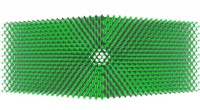
Khodayi-mehr ha costruito una scatola rettangolare con un muro che divide quasi in due lo spazio nel senso della lunghezza per creare un corridoio a forma di U in miniatura che imita uno spazio ufficio semplificato. Un ventilatore pompa l'aria nel corridoio a un'estremità della U e indietro dall'altra, mentre l'etanolo gassoso viene fatto fuoriuscire lentamente in uno degli angoli. Nonostante la semplicità di installazione, le correnti d'aria create all'interno sono turbolente e disordinate, creando un difficile problema di identificazione della fonte da risolvere per qualsiasi robot che annusa l'etanolo.
Ma il robot risolve comunque il problema.
Il robot effettua una misurazione della concentrazione, lo fonde con le misurazioni precedenti, e risolve un problema di ottimizzazione impegnativo per stimare dove si trova la fonte. Quindi individua la posizione più utile per effettuare la misurazione successiva e ripete il processo finché non viene trovata la fonte.
"Combinando modelli basati sulla fisica con una pianificazione ottimale del percorso, possiamo capire dove si trova la sorgente con pochissime misurazioni, " ha affermato Zavlanos. "Questo perché i modelli basati sulla fisica forniscono correlazioni tra misurazioni che non sono considerate in approcci puramente basati sui dati, e la pianificazione ottimale del percorso consente al robot di selezionare quelle poche misurazioni con il maggior contenuto di informazioni."
"I modelli basati sulla fisica non sono perfetti, ma trasportano comunque molte più informazioni rispetto ai soli sensori, " aggiunse Aquino. "Non devono essere esatti, ma consentono al robot di fare inferenze basate su ciò che è possibile all'interno della fisica dei flussi d'aria. Ciò si traduce in un approccio molto più efficiente".
Questa complessa serie di problem solving non è necessariamente più veloce, ma è molto più robusto. Può gestire situazioni con più fonti, che è attualmente impossibile per gli approcci euristici, e può anche misurare il tasso di contaminazione.
Il gruppo sta ancora lavorando per creare algoritmi di apprendimento automatico per rendere i loro modelli ancora più efficienti e precisi allo stesso tempo. Stanno anche lavorando per estendere questa idea alla programmazione di una flotta di robot per condurre una ricerca metodica di una vasta area. Anche se non hanno ancora provato l'approccio di gruppo nella pratica, hanno pubblicato simulazioni che ne dimostrano il potenziale.
"Il passaggio da un ambiente di laboratorio con impostazioni controllate a uno scenario più pratico richiede ovviamente di affrontare anche altre sfide, " ha detto Khodayi-mehr. "Per esempio, in uno scenario reale probabilmente non conosceremo la geometria del dominio in corso. Queste sono alcune delle direzioni di ricerca in corso su cui stiamo attualmente lavorando".
"Identificazione della sorgente attiva basata su modello in ambienti complessi". Reza Khodayi-mehr, Wilkins Aquino, Michael M. Zavlanos. Transazioni IEEE su robot , 2019.