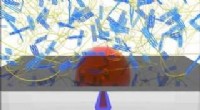
Guida cooperativa. Credito:Sarah Collins (Università di Cambridge)
Una flotta di auto senza conducente che lavorano insieme per mantenere il traffico in movimento senza intoppi può migliorare il flusso di traffico complessivo di almeno il 35 percento, ricercatori hanno dimostrato.
I ricercatori, dell'Università di Cambridge, ha programmato una piccola flotta di auto robotiche in miniatura per guidare su una pista a più corsie e ha osservato come cambiava il flusso del traffico quando una delle auto si fermava.
Quando le auto non guidavano in modo cooperativo, tutte le auto dietro l'auto ferma dovevano fermarsi o rallentare e aspettare un varco nel traffico, come accadrebbe tipicamente su una strada reale. Si è formata rapidamente una coda dietro l'auto ferma e il flusso generale del traffico è stato rallentato.
Però, quando le auto comunicavano tra loro e guidavano in modo cooperativo, non appena una macchina si fermava nella corsia interna, mandò un segnale a tutte le altre auto. Le auto nella corsia esterna che si trovavano nelle immediate vicinanze dell'auto ferma hanno rallentato leggermente in modo che le auto nella corsia interna fossero in grado di superare rapidamente l'auto ferma senza doversi fermare o rallentare in modo significativo.
Inoltre, quando un pilota controllato dall'uomo è stato messo sulla "strada" con le auto a guida autonoma e si è mosso lungo la pista in modo aggressivo, le altre vetture sono riuscite a cedere il passo per evitare il pilota aggressivo, migliorare la sicurezza.
I risultati, che sarà presentato oggi alla Conferenza Internazionale sulla Robotica e l'Automazione (ICRA) a Montréal, sarà utile per studiare come le auto autonome possono comunicare tra loro, e con auto controllate da conducenti umani, su strade reali in futuro.
"Le auto autonome potrebbero risolvere molti problemi diversi associati alla guida in città, ma ci deve essere un modo per loro di lavorare insieme, " ha detto il co-autore Michael He, uno studente universitario al St John's College, che ha progettato gli algoritmi per l'esperimento.

Credito:Sarah Collins (Università di Cambridge)
"Se diverse case automobilistiche sviluppassero tutte le proprie auto autonome con il proprio software, tutte quelle auto hanno bisogno di comunicare tra loro in modo efficace, " ha detto il coautore Nicholas Hyldmar, uno studente universitario al Downing College, che ha progettato gran parte dell'hardware per l'esperimento.
I due studenti hanno completato il lavoro nell'ambito di un progetto di ricerca universitario nell'estate 2018, nel laboratorio della Dott.ssa Amanda Prorok del Dipartimento di Informatica e Tecnologia di Cambridge.
Molti test esistenti per più auto senza conducente autonome vengono eseguiti digitalmente, o con modelli in scala troppo grandi o troppo costosi per effettuare esperimenti indoor con flotte di auto.
A partire da modelli in scala economici di veicoli disponibili in commercio con sistemi di sterzo realistici, i ricercatori di Cambridge hanno adattato le auto con sensori di motion capture e un Raspberry Pi, in modo che le auto possano comunicare tramite wifi.
Hanno quindi adattato un algoritmo di cambio di corsia affinché le auto autonome funzionino con una flotta di auto. L'algoritmo originale decide quando un'auto deve cambiare corsia, a seconda che sia sicuro farlo e se cambiare corsia aiuterebbe l'auto a muoversi più rapidamente nel traffico. L'algoritmo adattato consente alle auto di essere imballate più da vicino quando si cambia corsia e aggiunge un vincolo di sicurezza per prevenire incidenti quando le velocità sono basse. Un secondo algoritmo ha permesso alle auto di rilevare un'auto proiettata davanti ad essa e fare spazio.
Hanno quindi testato la flotta in modalità di guida "egocentrica" e "cooperativa", utilizzando comportamenti di guida sia normali che aggressivi, e ha osservato come la flotta ha reagito a un'auto ferma. Nella modalità normale, la guida cooperativa ha migliorato il flusso di traffico del 35% rispetto alla guida egocentrica, mentre per la guida aggressiva, il miglioramento è stato del 45%. I ricercatori hanno quindi testato come la flotta ha reagito a una singola auto controllata da un essere umano tramite un joystick.
"Il nostro design consente una vasta gamma di pratiche, esperimenti a basso costo da effettuare su auto a guida autonoma, " ha detto Prorok. "Per le auto autonome da utilizzare in sicurezza su strade reali, dobbiamo sapere come interagiranno tra loro per migliorare la sicurezza e il flusso del traffico".
Nel lavoro futuro, i ricercatori prevedono di utilizzare la flotta per testare sistemi multi-auto in scenari più complessi, comprese strade con più corsie, incroci e una gamma più ampia di tipi di veicoli.