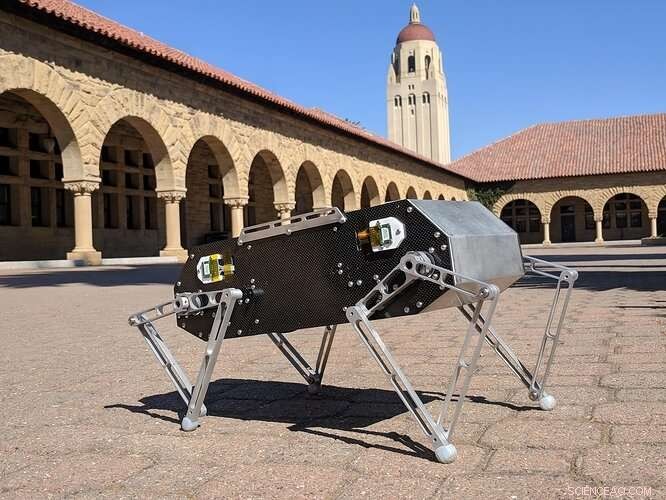
Stanford Doggo Project:un robot quadrupede alimentato da ODrive
Dando il loro tocco personale ai robot che vagano attraverso paesaggi complicati, il team Extreme Mobility del club di Stanford Student Robotics ha sviluppato un robot a quattro zampe che non solo è in grado di eseguire acrobazie e attraversare terreni impegnativi, ma è anche progettato tenendo conto della riproducibilità. Chiunque desideri la propria versione del robot, soprannominato Stanford Doggo, può consultare piani completi, codice e una lista delle forniture che gli studenti hanno messo gratuitamente a disposizione online.
"Avevamo visto questi altri robot quadrupedi usati nella ricerca, ma non erano qualcosa che potevi portare nel tuo laboratorio e usare per i tuoi progetti, " ha detto Nathan Kau, '20, una specializzazione in ingegneria meccanica e responsabile della mobilità estrema. "Volevamo che Stanford Doggo fosse questo robot open source che potevi costruire da solo con un budget relativamente piccolo".
Mentre altri robot simili possono costare decine o centinaia di migliaia di dollari e richiedere parti personalizzate, gli studenti di Extreme Mobility stimano il costo di Stanford Doggo a meno di $ 3, 000, compresi i costi di produzione e spedizione, e quasi tutti i componenti possono essere acquistati online così come sono. Sperano che l'accessibilità di queste risorse ispiri una comunità di creatori e ricercatori di Stanford Doggo che sviluppano spin-off innovativi e significativi dal loro lavoro.
Già Stanford Doggo può camminare, trotto, danza, salto, salta ed esegui occasionalmente il salto mortale all'indietro. Gli studenti stanno lavorando a una versione più grande della loro creazione, che attualmente ha le dimensioni di un beagle, ma si prenderanno una breve pausa per presentare Stanford Doggo alla Conferenza internazionale sulla robotica e l'automazione il 21 maggio a Montreal, Canada.
un salto, un salto e un salto mortale
Per rendere Stanford Doggo replicabile, gli studenti l'hanno costruito da zero. Ciò significava dedicare molto tempo alla ricerca di materiali facilmente reperibili e testare ogni parte man mano che la realizzavano, senza ricorrere a simulazioni.
"Sono passati circa due anni da quando abbiamo avuto l'idea di realizzare un quadrupede. Abbiamo sicuramente realizzato diversi prototipi prima di iniziare effettivamente a lavorare su questa iterazione del cane, "ha detto Natalie Ferrante, '19, uno studente coterminale di ingegneria meccanica e membro dell'Extreme Mobility Team. "È stato molto emozionante la prima volta che l'abbiamo fatto camminare".
I primi passi di Stanford Doggo furono certamente zoppicanti, ma ora il robot può mantenere un'andatura coerente e la traiettoria desiderata, anche se incontra terreni diversi. Lo fa con l'aiuto di motori che rilevano le forze esterne sul robot e determinano la forza e la coppia che ciascuna gamba dovrebbe applicare in risposta. Questi motori ricalcolano a 8, 000 volte al secondo e sono essenziali per la danza caratteristica del robot:un boogie rimbalzante che nasconde il fatto che non ha molle. Anziché, i motori agiscono come un sistema di molle virtuali, rimbalzando dolcemente ma allegramente il robot nella forma corretta ogni volta che percepiscono che è fuori posizione.
Tra le abilità e i trucchi che il team ha aggiunto al repertorio del robot, gli studenti sono rimasti eccezionalmente sorpresi dalla sua abilità nel salto. Esaminando Stanford Doggo una mattina (molto) presto in laboratorio, il team si è reso conto che si stava alzando senza sforzo per 2 piedi in aria. Spingendo i limiti del software del robot, Stanford Doggo è stato in grado di saltare 3, poi 3 piedi e mezzo da terra.
"Questo è stato quando ci siamo resi conto che il robot era, in alcuni aspetti, più performanti rispetto ad altri robot quadrupedi utilizzati nella ricerca, anche se costava davvero poco, " ha ricordato Kau.
Da allora, gli studenti hanno insegnato a Stanford Doggo a fare un salto mortale all'indietro, ma sempre su padding per consentire una rapida sperimentazione di tentativi ed errori.
Cosa farà ora Stanford Doggo?
Se questi studenti fanno a modo loro, il futuro di Stanford Doggo nelle mani delle masse.
"Speriamo di fornire un sistema di base che chiunque possa costruire, " ha detto Patrick Slade, dottorando in aeronautica e astronautica e tutor per la Mobilità Estrema. "Dire, Per esempio, volevi lavorare alla ricerca e al salvataggio; potresti equipaggiarlo con sensori e scrivere sopra il nostro codice che gli permetterebbe di arrampicarsi su cumuli di roccia o scavare attraverso caverne. O forse è raccogliere cose con un braccio o portare un pacco".
Questo non vuol dire che non stiano continuando il proprio lavoro. Extreme Mobility sta collaborando con il Robotic Exploration Lab di Zachary Manchester, assistente professore di aeronautica e astronautica, per testare nuovi sistemi di controllo su un secondo Stanford Doggo. Il team ha anche finito di costruire un robot due volte più grande di Stanford Doggo che può trasportare circa 6 chilogrammi di attrezzatura. Il suo nome è Stanford Woofer.