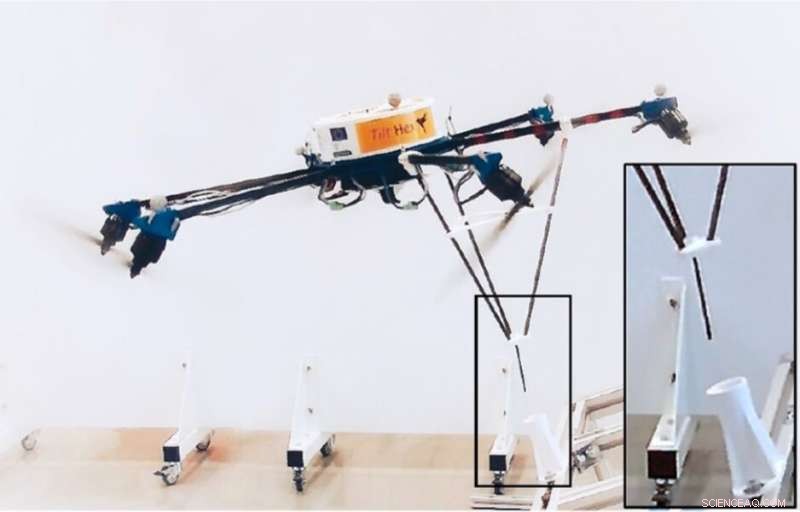
Il Tilt-Hex (piattaforma aerea NFTP con eliche inclinate sviluppata presso LAAS-CNRS) con l'end-effector rigidamente fissato. Nota come l'interazione avviene lontano e decentrato rispetto al veicolo CoM. Credito:Ryll et al.
Negli ultimi anni, i robot aerei sono diventati sempre più popolari, con potenziali applicazioni in svariati campi. Molti di questi robot sono progettati principalmente per volare e raccogliere dati visivi dall'ambiente circostante, eppure alcuni sono anche in grado di afferrare, trasportare o addirittura assemblare oggetti.
Dotare i robot aerei di capacità avanzate di interazione fisica potrebbe essere incredibilmente utile, in quanto consentirebbe loro di completare compiti più complessi. Però, a causa della natura complessa dell'aerodinamica, questo si è spesso rivelato molto impegnativo, in particolare quando un veicolo è vicino alle superfici.
Ricercatori dell'Università di Cassino e del Lazio Meridionale, L'Università di Tolosa e l'Università della Basilicata hanno recentemente introdotto un nuovo paradigma che consente il controllo dell'interazione 6-D nei robot aerei. Il loro approccio, delineato in un articolo pubblicato su SAGE's Rivista internazionale di ricerca sulla robotica , potrebbe aprire la strada allo sviluppo di sistemi aerei più efficaci che si comportano meglio dei robot esistenti nella manipolazione aerea e nei compiti di interazione fisica.
Il nuovo paradigma proposto dai ricercatori, chiamato effettore di estremità volante 6-D, può essere applicato alla maggior parte, se non tutto, sistemi completamente attuati in grado di tracciare una traiettoria a tutta posa con l'effettore finale. Nello studio, è stato specificamente applicato a Tilt-Hex, un nuovo robot aereo, consentendo il controllo indipendente della sua accelerazione lineare e angolare. Ciò alla fine ha permesso al robot di contrastare istantaneamente qualsiasi chiave inglese incontrata durante l'interazione con il suo ambiente.
"Sfruttando l'azionamento dell'elica inclinata, il robot è in grado di controllare l'intera posa 6D (posizione e orientamento indipendentemente) e di esercitare una chiave completa (forza e coppia indipendentemente) con un effettore finale fissato rigidamente, " spiegano i ricercatori nel loro articolo. "L'interazione è ottenuta per mezzo di uno schema di controllo dell'ammettenza in cui un controllo del ciclo esterno governa il comportamento dell'ammettenza desiderato (cioè conformità/rigidità dell'interazione, smorzamento, e massa) e un loop interno basato su dinamiche inverse garantiva il monitoraggio completo della posa in 6D."
Il paradigma sviluppato dai ricercatori stima le forze di interazione utilizzando un osservatore basato sul momento potenziato dall'unità di misurazione inerziale (IMU). Quando integrato con algoritmi robotici noti può ottenere la stima della chiave, così come il controllo del movimento e dell'interazione. interessante, questo "sistema integrato" non richiede un sensore di forza nella sua configurazione base e funziona anche con una suite di sensori minima.
I ricercatori hanno valutato l'efficacia del paradigma dell'effettore di estremità volante 6-D in una serie di esperimenti, concentrandosi su quattro casi di studio:un hard-touch e slide su una superficie in legno (ovvero il compito della superficie scorrevole), un compito piolo inclinato, un esperimento di modellazione dell'ammissione, e un compito in presenza di forze di interazione variabili nel tempo. Queste valutazioni hanno prodotto risultati molto promettenti, dimostrando la versatilità e la robustezza dell'approccio anche in presenza di incertezze ambientali.
Inoltre, si è scoperto che il nuovo paradigma supera le altre tecniche di manipolazione aerea nelle sue capacità, oltre che nella sua affidabilità, complessità e costi. Potrebbe quindi aiutare lo sviluppo di sistemi aerei più avanzati che si comportano meglio nelle attività di manipolazione e interazione fisica.
"Nel futuro, cercheremo la piena autonomia del sistema sostituendo il sistema di motion capture con una stima completa dello stato a bordo, " scrivono i ricercatori nel loro articolo. "Inoltre, lavoreremo sulla differenziazione delle forze di contatto sulla punta dell'utensile e dei disturbi sulla piattaforma (es. raffiche di vento)."
© 2019 Scienza X Rete