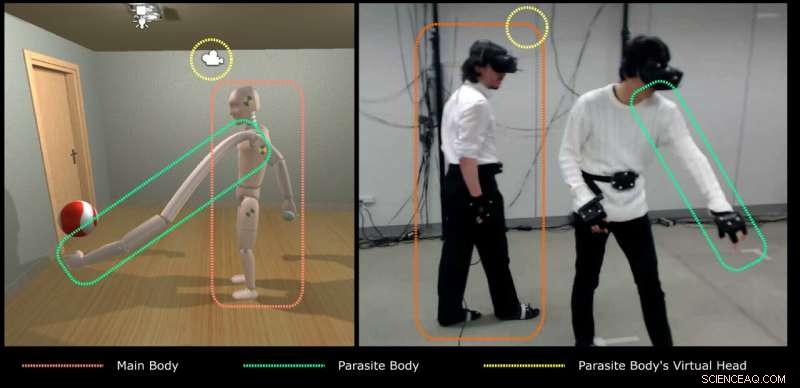
Il corpo parassita in due contesti. Sulla sinistra, la prospettiva della realtà virtuale. Sulla destra, lo spazio reale con entrambi i partecipanti. Il partecipante a sinistra (indicato in rosso) controlla il corpo principale. Il partecipante a destra (indicato in verde) controlla l'arto parassita. Il cerchio giallo indica la posizione della telecamera in entrambi i contesti. Credito:Takizawa et al.
I recenti progressi nella robotica hanno consentito lo sviluppo di sistemi per assistere gli esseri umani in una varietà di compiti. Un tipo di sistema robotico che ha guadagnato una notevole popolarità negli ultimi anni sono i bracci robotici indossabili gestiti a distanza da terzi.
Durante l'assistenza agli utenti, questi bracci devono raccogliere feedback visivi e condividerli con l'operatore di terze parti. Questo feedback può essere raccolto in diversi modi, il più comune dei quali è posizionare una telecamera sull'utente che "ospita" il braccio robotico, indicato anche come operatore del corpo principale (MBO). Questo particolare approccio per la raccolta di dati visivi, però, può essere un po' limitante, in quanto fortemente dipendente dai movimenti dell'utilizzatore che indossa il sistema.
Tenendo presente questa limitazione, ricercatori della Keio University, RIKEN AIP e l'Università di Tokyo hanno recentemente sviluppato un sistema di realtà virtuale (VR) per indagare il concetto di "modifica del corpo, " che prevede l'uso di arti robotici indossabili per assistere gli esseri umani nelle attività quotidiane. La loro ricerca è stata finanziata dal programma Exploratory Research for Advanced Technology (ERATO) della Japan Science and Technology Agency (JST).
"L'obiettivo generale del nostro lavoro recente era studiare l'editing del corpo come parte del nostro gruppo di ricerca, ERATO JIZAI, "Adrien Verhulst, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Modifica del corpo, come estendere il corpo con la tecnologia di robotica assistiva indossabile, è un concetto facile da trovare in alcune aree culturali, come nella serie manga parassita , di Hitoshi Iwaaki. Abbiamo pensato a noi stessi, "Avere un essere artificiale attaccato a te e assisterti è esattamente ciò che stiamo cercando, ' quindi abbiamo cercato di replicare vagamente l'idea in VR."
Verhulst ei suoi colleghi volevano condurre quello che si potrebbe definire un esperimento di "corpo condiviso". Invece di proporre una soluzione per superare i limiti degli attuali sistemi per raccogliere feedback visivi, si sono proposti di confrontare e valutare gli approcci esistenti.
Per fare questo, hanno sviluppato un sistema VR che utilizza la tecnologia optitrack per tracciare il corpo di un utente e un display montato sulla testa (HMD) per visualizzare la direzione sia dell'MBO che del corpo del braccio robotico. Nella loro carta, i ricercatori si riferiscono all'utente del braccio robotico come al "corpo principale" e al teleoperatore di terze parti come al "corpo parassita".
"È logico pensare che se il 'corpo parassita' è attaccato al corpo principale, poi quando il corpo principale si muove, il parassita finirà per ammalarsi, giusto?" disse Verhulst. "Di conseguenza, le domande che ci siamo posti sono:Come dobbiamo adattare il feedback visivo raccolto dal corpo? Dovrebbe essere un terzo punto di vista, come nei videogiochi? Quindi dove dovrebbe essere posizionato:sopra il corpo principale, sul lato, o piuttosto vicino all'azione? Forse potremmo condividere lo stesso punto di vista? O una vista che dipende dal movimento di entrambe le persone?"
I team di diverse aziende e istituzioni hanno presentato diversi approcci per raccogliere feedback visivi dai bracci robotici. I più importanti tra questi sono il concetto di "visione condivisa", la visuale in terza persona e la visuale ravvicinata all'azione.
Come suggerito dai loro nomi, l'approccio di visualizzazione condivisa raccoglie feedback visivi che corrispondono a ciò che vede l'utente che indossa il braccio robotico; la terza persona vede ciò che vedrebbe una terza persona se si trovasse accanto o dietro l'utente, e la vista ravvicinata all'azione mostra un primo piano dell'attività che viene completata. I ricercatori hanno voluto indagare se queste diverse modalità di visualizzazione dovessero dipendere dal movimento del corpo principale, il corpo parassita, o entrambi.
Per approfondire questa domanda, hanno effettuato un esperimento su 16 utenti umani utilizzando il sistema VR da loro sviluppato. Ciò ha permesso loro di raccogliere informazioni interessanti sui diversi approcci per la raccolta del feedback visivo. Ciò nonostante, i loro risultati sono ancora preliminari, poiché il numero di persone che hanno partecipato al loro studio è limitato.
"Le persone hanno bisogno di sentirsi orientate nella direzione del loro arto per usarlo. Prova questo:se metti una telecamera di fronte a te con un'angolazione strana, e puoi vedere solo te stesso da quella telecamera, avrai più difficoltà a muovere il braccio in una determinata direzione, " Spiegò Verhulst. "Ciò significa che ogni volta che il corpo principale si muove, il corpo del parassita si riorienta. interessante, non abbiamo notato una netta differenza nei punteggi di proprietà del corpo, il che significa che non importa il punto di vista, i partecipanti sentivano di "possedere" il loro corpo, e che ne avevano il controllo".
Le osservazioni raccolte da Verhulst e dai suoi colleghi suggeriscono che la dipendenza dal punto di vista non è così importante. In altre parole, se si raccoglie un feedback visivo posizionando una telecamera sul braccio robotico, sulla spalla dell'utente umano, o tra i due, può ancora ottenere la corretta "proprietà del corpo" quando guarda attraverso la fotocamera.
"I risultati che abbiamo raccolto sono stati molto sorprendenti, " Ha aggiunto Verhulst. "Non abbiamo inoltre osservato alcuna difficoltà significativa in termini di carico di lavoro (ovvero carico fisico, carico mentale, sforzo, tempo), quale, ancora, suggerisce che la dipendenza dalla fotocamera non ha importanza in questo senso. Però, la performance dei partecipanti è stata un po' migliore in situazioni in cui la vista dipende sia dal corpo principale che dal parassita, suggerendo che per la massima efficacia, potrebbe essere meglio posizionare la fotocamera sul corpo principale, ma essere motorizzato per seguire il movimento della persona che controlla il braccio del robot."
L'indagine condotta da questo team di ricercatori si è concentrata specificamente sulla dipendenza dalla prospettiva degli operatori di terze parti del braccio robotico in compiti che prevedevano la ricerca e il raggiungimento di oggetti. Nel futuro, il sistema VR che hanno sviluppato potrebbe essere utilizzato anche per studiare approcci per raccogliere feedback visivi su compiti più elaborati e realistici.
"Il passo successivo è creare un ambiente sperimentale con situazioni e configurazioni più realistiche, "Ryo Takizawa, un altro ricercatore coinvolto nello studio, ha detto a TechXplore. "Esplorare metodi di cooperazione nel lavoro collaborativo, stiamo pensando di limitare i metodi di comunicazione e migliorare i modelli VR, e così via."
I ricercatori hanno deciso di utilizzare la realtà virtuale e realizzare un esperimento virtuale perché era una soluzione facile ed economica che non richiedeva la manutenzione di sistemi robotici avanzati. Al fine di accertare la fondatezza delle loro conclusioni, però, alla fine dovranno confrontare i loro risultati con quelli ottenuti utilizzando un vero braccio robotico.
Nel loro lavoro futuro, Verhulst e i suoi colleghi hanno anche in programma di condurre un esperimento simile in cui i partecipanti vengono formati sul compito che dovranno completare in anticipo, poiché credono che ciò porterebbe a risultati diversi. In questo studio, infatti, gli utenti non hanno ricevuto alcuna formazione prima di utilizzare la loro piattaforma VR.
"Dobbiamo considerare come progettare un compito o un programma di allenamento in un contesto corporeo modificato e condiviso, soprattutto in termini di come levigare, se non valorizzare, compiti cooperativi, "Katie Seaborn, un altro ricercatore coinvolto nello studio, ha detto a TechXplore. "Ho esplorato la nozione di stesso tempo, sincronia dello stesso movimento, che è stato collegato a incrementi nelle prestazioni cooperative in altri contesti. Ci chiediamo se una tale strategia di "azione condivisa" funzionerebbe in questo caso, con due persone che condividono un corpo molto insolito in VR."
© 2019 Scienza X Rete