Luce LED che illumina la struttura del merletto ottico quando lasciata sola e quando è deformata. Credito:Xu et al., Sci. Robot. 4, eaaw6304 (2019)
Un nuovo materiale sintetico che crea una rete sensoriale collegata simile a un sistema nervoso biologico potrebbe consentire ai robot morbidi di percepire come interagiscono con il loro ambiente e regolare le loro azioni di conseguenza.
Il materiale elastico in pizzo ottico è stato sviluppato da Ph.D. la studentessa Patricia Xu attraverso l'Organic Robotics Lab della Cornell University.
"Vogliamo avere un modo per misurare sollecitazioni e deformazioni per oggetti altamente deformabili, e vogliamo farlo usando l'hardware stesso, non visione, " ha detto il direttore del laboratorio Rob Shepherd, professore associato di ingegneria meccanica e aerospaziale e autore senior del documento. "Un buon modo per pensarci è da una prospettiva biologica. Una persona cieca può ancora sentire perché ha dei sensori nelle dita che si deformano quando il dito si deforma. I robot non ce l'hanno in questo momento".
Il laboratorio di Shepherd aveva precedentemente creato schiume sensoriali che utilizzavano fibre ottiche per rilevare tali deformazioni. Per il progetto pizzo ottico, Xu ha usato un flessibile, struttura reticolare porosa realizzata in poliuretano stampato in 3D. Ha infilato il suo nucleo con fibre ottiche estensibili contenenti più di una dozzina di meccanosensori e poi ha attaccato una luce a LED per illuminare la fibra.
Quando premeva la struttura reticolare in vari punti, i sensori sono stati in grado di individuare i cambiamenti nel flusso di fotoni.
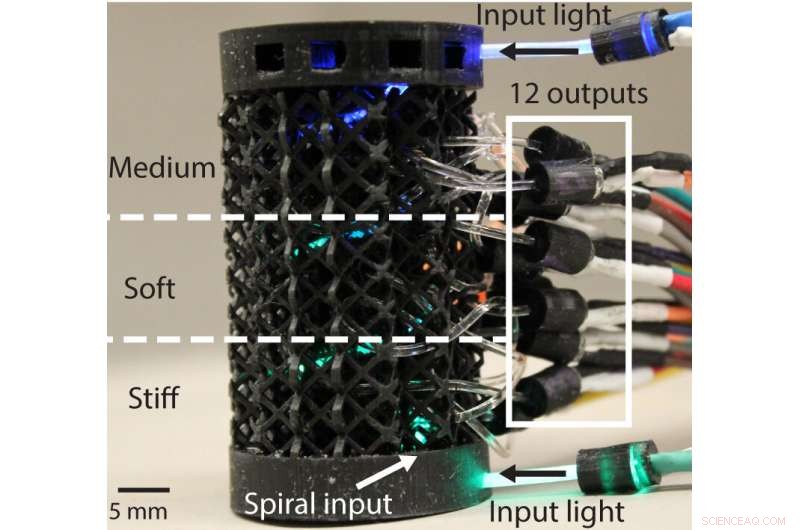
Il cilindro in schiuma propriocettiva. Credito:Xu et al., Sci. Robot. 4, eaaw6304 (2019)
"Quando la struttura si deforma, hai un contatto tra la linea di ingresso e le linee di uscita, e la luce salta in questi circuiti di uscita nella struttura, in modo da poter dire dove sta avvenendo il contatto, " disse Xu. "L'intensità di questo determina l'intensità della deformazione stessa."
Il pizzo ottico non verrebbe utilizzato come rivestimento della pelle per i robot, pastore ha detto, ma sarebbe più simile alla carne stessa. I robot dotati di questo materiale sarebbero più adatti per il settore sanitario, in particolare l'assistenza all'inizio e alla fine della vita, e manifatturiero.
Mentre il pizzo ottico non ha la stessa sensibilità di un dito umano, che è pieno zeppo di recettori nervosi, il materiale è più sensibile al tatto rispetto alla schiena umana. Il materiale è lavabile, pure, che porta a un'altra applicazione:Shepherd's lab ha lanciato una startup per commercializzare i sensori di Xu per realizzare indumenti in grado di misurare la forma e i movimenti di una persona per l'allenamento con la realtà aumentata.
La carta, "Laccio ottico per reti neurali afferenti sintetiche, " è stato pubblicato l'11 settembre in Robotica scientifica .