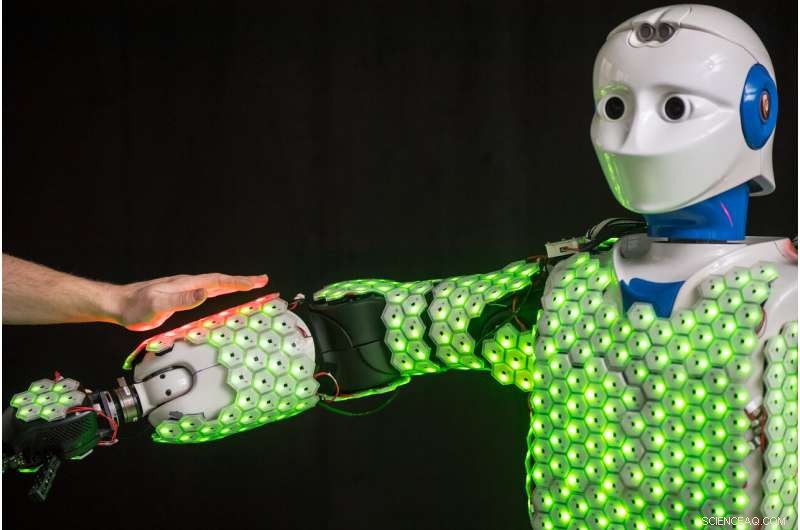
Ogni cellula di questa pelle artificiale sviluppata dai ricercatori dell'Università tecnica di Monaco (TUM) è dotata di un microprocessore e di sensori per rilevare il contatto, accelerazione, vicinanza e temperatura. Nuovi algoritmi di controllo hanno permesso per la prima volta di applicare la pelle artificiale a un robot di dimensioni umane. Attestazione:Astrid Eckert/TUM
La pelle sintetica sensibile consente ai robot di percepire il proprio corpo e l'ambiente circostante, una capacità cruciale se devono essere a stretto contatto con le persone. Ispirato dalla pelle umana, un team dell'Università tecnica di Monaco (TUM) ha sviluppato un sistema che combina la pelle artificiale con algoritmi di controllo e lo ha utilizzato per creare il primo robot umanoide autonomo con pelle artificiale per tutto il corpo.
La pelle artificiale sviluppata dal Prof. Gordon Cheng e dal suo team è costituita da cellule esagonali delle dimensioni di una moneta da due euro (cioè circa un pollice di diametro). Ciascuno è dotato di microprocessore e sensori per rilevare il contatto, accelerazione, vicinanza e temperatura. Tale pelle artificiale consente ai robot di percepire l'ambiente circostante in modo molto più dettagliato e con maggiore sensibilità. Questo non solo li aiuta a muoversi in sicurezza. Inoltre, li rende più sicuri quando operano vicino alle persone e offre loro la capacità di anticipare ed evitare attivamente gli incidenti.
Le stesse cellule della pelle sono state sviluppate circa 10 anni fa da Gordon Cheng, Professore di Sistemi Cognitivi presso TUM. Ma questa invenzione ha rivelato il suo pieno potenziale solo quando è stata integrata in un sistema sofisticato come descritto nell'ultimo numero della rivista Atti dell'IEEE .
Maggiore capacità di calcolo grazie all'approccio basato sugli eventi
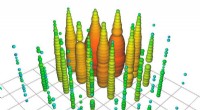
Il più grande ostacolo nello sviluppo della pelle dei robot è sempre stata la capacità di calcolo. La pelle umana ha circa 5 milioni di recettori. Gli sforzi per implementare l'elaborazione continua dei dati dai sensori nella pelle artificiale si scontrano presto con i limiti. I sistemi precedenti venivano rapidamente sovraccaricati di dati provenienti da poche centinaia di sensori.
Per superare questo problema, utilizzando un approccio neuro-ingegneristico, Gordon Cheng e il suo team non monitorano continuamente le cellule della pelle, ma piuttosto con un sistema basato sugli eventi. Ciò riduce lo sforzo di elaborazione fino al 90%. Il trucco:le singole celle trasmettono informazioni dai loro sensori solo quando i valori vengono modificati. Questo è simile al modo in cui funziona il sistema nervoso umano. Per esempio, sentiamo un cappello quando lo indossiamo per la prima volta, ma ci abituiamo presto alla sensazione. Non c'è bisogno di notare di nuovo il cappello finché il vento non lo spazza via dalla nostra testa. Ciò consente al nostro sistema nervoso di concentrarsi su nuove impressioni che richiedono una risposta fisica.
Sicurezza anche in caso di stretto contatto corporeo
Con l'approccio basato sugli eventi, Il prof. Cheng e il suo team sono ora riusciti ad applicare la pelle artificiale a un robot autonomo di dimensioni umane che non dipende da alcun calcolo esterno. Il robot H-1 è dotato di 1260 celle (con più di 13000 sensori) sulla parte superiore del corpo, braccia, gambe e persino le piante dei piedi. Questo gli dà una nuova "sensazione corporea". Per esempio, con i suoi piedi sensibili, H-1 è in grado di rispondere a superfici irregolari del pavimento e persino di bilanciarsi su una gamba.
Con la sua pelle speciale, l'H-1 può persino abbracciare una persona in modo sicuro. È meno banale di quanto sembri:i robot possono esercitare forze che potrebbero ferire gravemente un essere umano. Durante un abbraccio, due corpi si toccano in molti posti diversi. Il robot deve utilizzare queste complesse informazioni per calcolare i giusti movimenti ed esercitare le corrette pressioni di contatto. "Questo potrebbe non essere così importante nelle applicazioni industriali, ma in settori come l'assistenza infermieristica, i robot devono essere progettati per un contatto molto stretto con le persone, " spiega Gordon Cheng.
Credito:Università tecnica di Monaco
Versatile e robusto
Il sistema di skin per robot di Gordon Cheng è anche molto robusto e versatile. Poiché la pelle è costituita da cellule, e non un solo pezzo di materiale, rimane funzionante anche se alcune cellule smettono di funzionare. "Il nostro sistema è progettato per funzionare senza problemi e rapidamente con tutti i tipi di robot, " dice Gordon Cheng. "Ora stiamo lavorando per creare cellule della pelle più piccole con il potenziale per essere prodotte in numero maggiore".