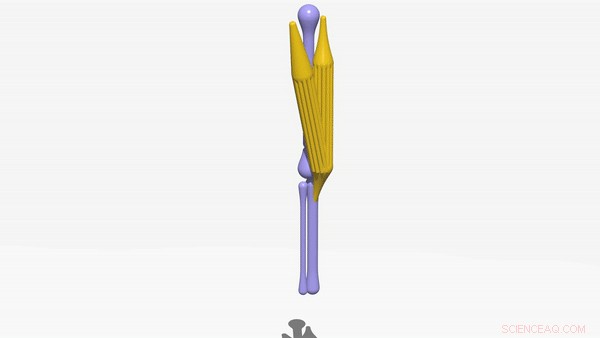
Risultato della simulazione di un'articolazione del gomito che esegue la flessione dell'articolazione isocinetica. Omero, ulna e radio sono modellati con filamenti rigidi in viola. I tendini sono modellati con filamenti affusolati in giallo. Due capi di bicipiti costituiti da 36 filamenti stanno eseguendo la massima contrazione volontaria. Le condizioni al contorno vengono applicate per garantire una velocità angolare costante. Credito:Comunicazioni sulla natura, doi:10.1038/s41467-019-12759-5
Scienziati della vita e bioingegneri studiano i sistemi e gli organismi naturali per comprenderne i meccanismi biofisici, al fine di guidare le applicazioni di ingegneria biomimetica in laboratorio. In un recente rapporto su Comunicazioni sulla natura , Xiaotian Zhang e colleghi dei dipartimenti di ingegneria meccanica e applicazioni di supercalcolo negli Stati Uniti hanno presentato un approccio numerico per simulare le architetture muscoloscheletriche. Il metodo si basava sull'assemblaggio di barre Cosserat attive e passive eterogenee (una curva basata su barre orientate in modo deformabile) in strutture dinamiche per modellare le ossa, tendini, legamenti, fibre e connettività muscolare. Hanno dimostrato le applicazioni della tecnica risolvendo una serie di problemi in scenari biologici e robotici morbidi in molti ambienti e scale. Il team ha progettato robot bioibridi su scala millimetrica e ha ricostruito complessi sistemi muscoloscheletrici. Il metodo è versatile e offre una struttura per assistere i progetti di bioingegneria in avanti e inversa per scoperte fondamentali sulle funzioni degli organismi viventi.
I sistemi muscoloscheletrici contengono ossa, muscoli, tendini e legamenti per funzionare insieme nei sistemi biologici nativi. intrigante, tali architetture contengono un nesso inscindibile tra attuazione e controllo, topologia e meccanica dei costituenti non lineari. In netto contrasto con i robot a corpo rigido, creature biologiche morbide possono implementare deformazioni e instabilità strutturali per funzionare all'interno di complessi, ambienti non strutturati e dinamici. Le architetture muscoloscheletriche biologiche possiedono una distribuzione intrinseca, morbidezza e conformità nell'esternalizzare le attività di controllo a una varietà di compartimenti. Questa proprietà fornisce la base per un paradigma emergente nella robotica di ispirazione biologica noto come calcolo morfologico o intelligenza meccanica. Le considerazioni hanno portato a una serie di progressi sperimentali nella robotica morbida con materiali conformi artificiali per formare robot bioibridi morbidi. Nonostante i progressi sperimentali nel campo, gli sforzi per modellare e simulare architetture muscoloscheletriche dinamiche attraverso strutture biologiche e sintetiche restano da compiere.
Simulazione dell'articolazione del gomito umano
Zhang et al. prima dimostrato un metodo per includere dinamiche complete di deformazione come piega, intrecciare, taglio e stiramento coinvolti con architetture biologiche. Per questo, si sono basati sul lavoro precedente sulle aste di cosserat per stabilire un approccio di modellazione muscoloscheletrica per simulare realisticamente l'attività, layout biologici eterogenei in un approccio graduale per sintetizzare e replicare architetture viventi con strati biologici di complessità per applicazioni biomimetiche avanzate. Il lavoro ha permesso loro di replicare i sistemi biologici imitando la biomeccanica sottostante e ha fornito l'accesso allo studio e alla comprensione delle funzioni biofisiche degli organismi biologici nel silicio. Lo studio ha dimostrato che le applicazioni dei modelli di aste svolgono un ruolo prezioso durante la modellazione di sistemi attivi complessi per architetture biomimetiche.
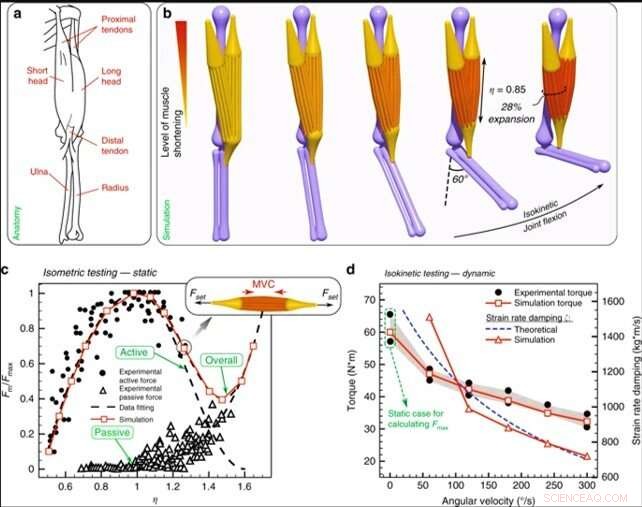
Azionamento del gomito umano. (a) Anatomia del gomito. (b) Simulazione di un gomito composto da tre ossa (omero, ulna e radio) e due capi del bicipite (capo corto e capo lungo) che eseguono una flessione completa. (c) Dati sperimentali e simulazioni per la forza attiva e passiva normalizzata con la forza di picco (Fm/Fmax) durante l'esercizio isometrico (Fset imita la resistenza incontrata dal muscolo e determina la sua lunghezza di equilibrio ). (d) Misure sperimentali e di simulazione della coppia dell'articolazione del gomito (angolata a 60°) eseguendo le massime flessioni concentriche isocinetiche a diverse velocità angolari insieme al corrispondente smorzamento della velocità di deformazione muscolare complessiva . I determinati numericamente vengono poi confrontati con stime teoriche basate sul modello di Hill. Credito:Comunicazioni sulla natura, doi:10.1038/s41467-019-12759-5
Durante la prima simulazione biomimetica, Zhang et al. usato un'articolazione del gomito umano con muscoli, tendini e ossa per illustrare assemblaggi di aste mappati alla fisiologia, dinamica e morfologia. Per esempio, l'articolazione del gomito ha mostrato caratteristiche morbide e rigide, dinamica semplificata e spazio di configurazione ridotto. L'analisi ha permesso loro di verificare e calibrare il modello sulla base di dati anatomici e biomeccanici prontamente disponibili da mettere in relazione con il modello Hill. Il livello di dettaglio della rappresentazione ha permesso loro di affrontare le esigenze kinesiologiche specifiche del paziente umano e di ricostruire virtualmente una replica 3D di un'articolazione del gomito umano utilizzando test isometrici e isocinetici applicabili all'ingegneria del tessuto osseo. Gli scienziati potrebbero modellare, calibrare e validare l'attivazione di una singola unità muscolare, dove il risultato riproduceva la dinamica e la morfologia di un sistema biologico. L'attuale approccio alla modellazione presentava caratteristiche chiave che lo distinguevano dal modello Hill, includere (a) singole aste per il reclutamento selettivo per simulare un infortunio, e (b) muscoli cedevoli che possono piegarsi, torsione e taglio realisticamente alle forze dinamiche attraverso l'intera struttura o all'interno dell'ambiente.
Robot bio-ibridi di ingegneria
Nel prossimo esperimento, il team ha progettato robot bioibridi utilizzando il loro solutore computazionale per guidare la progettazione e la fabbricazione di robot bioibridi che nuotano e camminano su scala millimetrica. Per studiare il comportamento di nuoto dei robot, hanno prima risolto i problemi utilizzando la modellazione numerica e le simulazioni di un flagello bioibrido precedentemente stabilito. Per questo, hanno creato una replica esatta del nuotatore originale e hanno modellato il substrato di polidimetilsilossano (PDMS) per imitare la geometria sperimentale e le proprietà del materiale con cellule raggruppate viventi modellate come piccole, filamento molle e contrattile connesso al substrato. Le osservazioni qualitative e quantitative del movimento del nuoto tra la simulazione e l'esperimento combaciavano bene.
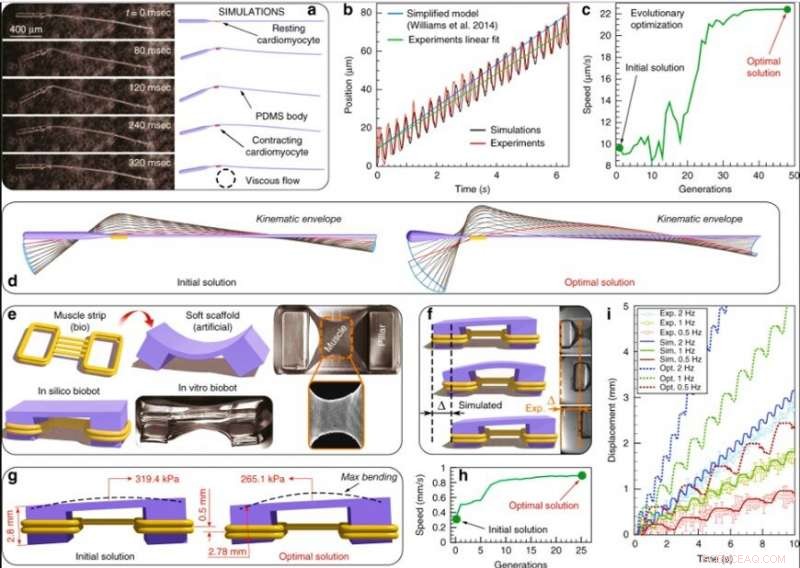
Progettazione robotica bio-ibrida. (a) Confronto uno a uno del robot con fotografie sperimentali in diverse fasi all'interno di un ciclo di nuoto. (b) Posizione assiale del centro del robot monitorata su più di 20 cicli rispetto ai dati sperimentali. (c) Corso di ottimizzazione:la convergenza alla soluzione ottimale si osserva dopo 48 generazioni. L'ottimizzazione è stata vincolata con la lunghezza della testa entro [0, 1,927] mm, raggio della testa entro [4, 40]μm, raggio di coda entro [4, 6.5]μm e posizione delle cellule in qualsiasi punto lungo la coda. La dimensione longitudinale del bot è fissata a L=1,927 mm, in modo che la lunghezza della coda possa essere dedotta dalla lunghezza della testa. Gli intervalli dei parametri sono determinati per tenere conto della producibilità effettiva. (d) Visualizzazione di entrambi i progetti originali e ottimali che mostrano le configurazioni a riposo e gli inviluppi cinematici della linea mediana in un periodo. Dettagli originali del nuotatore:il substrato è modellato con una testa lunga 424 μm e una coda lunga 1503 μm con raggi rispettivamente di 20 μm e 7 μm. Densità ρ=0,965 gcm-3, Modulo di Young E=3,86MPa, rigidità alla flessione EI=2.427×10−9Nmm2, massa m=7.364×10−7g sono impostati. La cellula contrattile è modellata con raggio 10μm e lunghezza 100μm. La cella è predisposta per produrre una forza di contrazione F=σmA=12μN con frequenza di battimento f=3.6Hz23. Il fluido ha viscosità dinamica μ=1,2×10−3Pa⋅s. Dettagli del nuotatore ottimizzati:il substrato ha lunghezza e raggio di 190μm e 32,3μm, rispettivamente. La cellula contrattile è attaccata a 190μm di distanza dalla testa e la coda ha uno spessore di 4,3μm. (e) Disegno generale del deambulatore con elementi gialli che rappresentano anelli muscolari ed elementi viola che rappresentano lo scheletro. Immagini sperimentali adattate da studi precedenti. (f) Simulazioni contro esperimenti:spostamento del Bot su 2 secondi per la frequenza di attuazione 1 Hz. (g) Visualizzazione del design iniziale e ottimizzato del deambulatore. (h) Il corso di ottimizzazione converge dopo 25 generazioni. L'ottimizzazione è stata vincolata dal modulo di Young dello scheletro [250-350] kPa, lunghezza del pilastro più corto [2,4–3,4] mm e posizione della fascia muscolare [0,5–3] mm (distanza dal suolo), tutti scelti in base a vincoli di producibilità. (i) Comportamento dinamico di camminatori simulati (linee continue) e sperimentali (marcatori con barre di errore) con contrazione muscolare a diverse frequenze, e confronto delle prestazioni di camminata tra il design iniziale (linee continue) e ulteriormente ottimizzato (linee tratteggiate). Credito:Comunicazioni sulla natura, doi:10.1038/s41467-019-12759-5
Dopo aver modellato e ottimizzato il nuotatore bioibrido, hanno tentato di progettare computazionalmente un deambulatore bioibrido come sviluppato in precedenza per formare la macchina biologica mobile più veloce fino ad oggi da Pagan-Diaz et al., basato su un precedente robot bio-ibrido. Strutturalmente, il modello Pagan-Diaz conteneva un'impalcatura di idrogel asimmetrica e tessuti muscolari scheletrici per assomigliare alle relazioni muscolo-tendine-osso in vivo e operato in un bagno di soluzione in laboratorio. Sperimentalmente, hanno sospeso i muscoli e li hanno elettricamente scossi per indurre la contrazione per il movimento tramite asimmetria e attrito.
Zhang et al. simulato questa architettura nel presente lavoro, per progettare un nuovo scaffold e disposizioni muscolari topologiche del bot. La nuova topologia del tessuto muscolare conteneva una sezione a striscia sottile che collegava due anelli avvolti attorno alle gambe dello scheletro per trasferire le forze di contrazione muscolare, che hanno testato utilizzando studi di riferimento. Zhang et al. dimostrato sperimentalmente il progetto di calcolo con il modello Pagan-Diaz per costruire un nuovo bio-bot con il doppio della velocità del robot bio-ibrido originale; con un buon accordo osservato nella simulazione. Il team di ricerca ha mostrato il potenziale dell'approccio computazionale per incapsulare la fisica di sistemi robotici morbidi alimentati da cellule e muscoli per le applicazioni desiderate per progettare prototipi più flessibili.

Movimento strisciante del modello di serpente muscoloscheletrico con quattro gruppi muscolari. Le disposizioni dei gruppi muscolari sono ottimizzate per la massima velocità in avanti. Il colore dei gruppi muscolari indica il livello di contrazione muscolare. Credito:Comunicazioni sulla natura, doi:10.1038/s41467-019-12759-5.
Ingegneria serpenti striscianti
Il team ha quindi utilizzato l'approccio numerico ideato nell'ambito dello studio per facilitare la producibilità dei robot bioibridi e comprendere la biomeccanica. I bioingegneri avevano precedentemente condotto numerosi esperimenti sulla locomozione dei serpenti per costruire repliche di robot bersaglio utilizzando servomotori (attuatori rotanti). Nel presente esperimento, hanno sviluppato un serpente elastico completamente morbido ispirato ai veri serpenti ma efficacemente attuato con diversi gruppi muscolo-tendinei per ottenere un movimento ondulatorio regolare. Il team di ricerca ha dimostrato che mentre i serpenti biologici avevano più muscoli per orchestrare andature e deformazioni del corpo, il modello richiedeva solo poche caratteristiche per scivolare in avanti in modo fluido ed efficace.
Per un design ottimale, gli scienziati hanno accoppiato il loro solutore computazionale con l'algoritmo Covariance Matrix Adaptation-Evolution Strategy (CMA-ES) per identificare le posizioni e i modelli di attuazione per la massima velocità di avanzamento. Zhang et al. confrontato e verificato i risultati con simulazioni di riferimento e registrazioni sperimentali. Il team mirava principalmente a rivelare i principi di progettazione architettonica nascosti ed esporre la loro funzione per scopi ingegneristici. Hanno accuratamente orchestrato l'attuazione distribuita per andature fluide e realistiche in netto contrasto con le controparti rigide del robot serpente. I ricercatori hanno anche implementato un framework per semplificare, testare e utilizzare i principi biomeccanici di sistemi biologici complessi per creare un ambiente realisticamente strisciante, veloce, serpente soft-robotic basato su pochi semplici attuatori.
La vista frontale di una coppia di ali costituita da 6342 filamenti, dove i filamenti verdi indicano le piume. Un processo di iniziazione solleva le ali dalla posizione piatta ed è seguito da una singola corsa in discesa e in salita durante la fase di decollo. Credito:Comunicazioni sulla natura, doi:10.1038/s41467-019-12759-5.
Ali piumate ingegneristiche
Per dimostrare una strategia di locomozione più complessa che includa strutture biologiche aggiuntive con funzioni critiche, il team ha sviluppato un piumato, ala di uccello muscoloscheletrico in silico. I bioingegneri avevano precedentemente condotto una serie di studi per comprendere le caratteristiche biofisiche del volo degli uccelli, dai modelli di attivazione muscolare alla biomeccanica delle piume. Nel presente lavoro, Zhang et al. considerata la struttura alare dinamica di un piccione e ricostruito le penne in silico con rigidezza flessionale, coerente con gli studi precedenti.
In totale, hanno collegato 19 piume al modello di ala computazionale conforme ai dati biologici del piccione viaggiatore. Includevano quattro muscoli associati alle articolazioni della spalla e del gomito per controllare l'attivazione delle ali e il morphing rispetto al modello dell'articolazione del gomito umano. Sebbene questo primo modello in studio non abbia catturato l'aerodinamica complessa associata al volo svolazzante, ha fornito una stima preliminare. Il team ha riprodotto la cinematica delle ali trasformate durante il decollo e ha basato i modelli di attivazione muscolare su segnali elettromiografia (EMG) registrati sperimentalmente in precedenza.
In questo modo, Xiaotian Zhang e un team di ricercatori hanno presentato un nuovo metodo per assemblare eterogenei, aste cosserat attive e passive per simulare dinamiche, architetture muscoloscheletriche che possono subire deformazioni per facilitare il movimento biomimetico. L'approccio ha affrontato una mancanza esistente di tecniche ingegneristiche nella robotica morbida per colmare il divario tra la modellazione del corpo rigido e le simulazioni con metodo degli elementi finiti (FEM) ad alta fedeltà.
Utilizzando le caratteristiche favorevoli sviluppate nello studio, il team di ricerca ha progettato sistemi a corpo molle per risolvere una serie di problemi relativi alla robotica morbida e alle strutture biologiche complesse in ambienti diversi. Il nuovo lavoro ha mostrato la versatilità dell'approccio per stabilire una strategia promettente per applicazioni ad ampio raggio attraverso le strutture di ispirazione biologica della bioingegneria per scoprire le caratteristiche sottostanti degli organismi viventi.
© 2019 Scienza X Rete