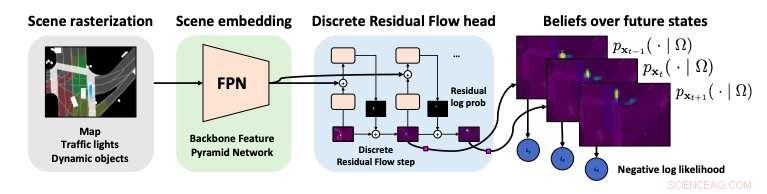
Panoramica della rete a flusso residuo discreto. Credito:Jain et al.
Negli anni a venire, i veicoli a guida autonoma potrebbero gradualmente diventare un mezzo di trasporto popolare. Prima che questo possa accadere, però, i ricercatori dovranno sviluppare strumenti che garantiscano che questi veicoli siano sicuri e possano navigare in modo efficiente in ambienti popolati dall'uomo.
Poiché i veicoli a guida autonoma sono in definitiva progettati per aggirare ostacoli sia statici che in movimento, dovrebbero essere in grado di rilevare rapidamente gli oggetti ed evitarli. Un modo per raggiungere questo obiettivo potrebbe essere quello di sviluppare modelli in grado di prevedere il comportamento futuro di oggetti o persone per strada, per stimare dove si troveranno quando il veicolo si avvicinerà a loro.
Prevedere i cambiamenti futuri negli ambienti urbani, però, può essere molto impegnativo. È particolarmente difficile quando si tratta di prevedere il comportamento umano, come i movimenti o le azioni impreviste dei pedoni.
L'anno scorso, una delle auto a guida autonoma di Uber ha ucciso Elaine Herzberg, una donna di 49 anni, nell'Arizona. Questo incidente, insieme a decine di altri, ha suscitato un ampio dibattito sulla sicurezza dei veicoli a guida autonoma, nonché se questi veicoli debbano essere testati in ambienti popolati.
Circa una settimana fa, nuovi documenti rilasciati dal National Transport Safety Board (NTSB) degli Stati Uniti hanno rivelato che il veicolo autonomo di Uber coinvolto nell'incidente mortale dello scorso anno non ha identificato Herzberg come pedone fino a quando non è stato troppo tardi. Gli stessi rapporti suggeriscono che il veicolo autonomo coinvolto nell'incidente non è mai stato addestrato a rilevare i pedoni al di fuori di un passaggio pedonale.
Herzberg stava passeggiando al momento dell'incidente, quindi i difetti del software rivelati dal rapporto NTSB spiegherebbero perché il veicolo a guida autonoma di Uber non è riuscito a individuarla, che alla fine ne causò la morte. Le nuove analisi rilasciate da NTSB potrebbero porre fine al programma di veicoli a guida autonoma dell'azienda, che aveva ripreso a testare a dicembre 2018 dopo essere stato sospeso per diversi mesi.
Queste nuove scoperte evidenziano la necessità di sviluppare un'intelligenza artificiale più avanzata e un software più affidabile prima che i veicoli a guida autonoma possano essere testati su strade reali. interessante, alcuni giorni prima che NTSB rilasciasse questi documenti, un articolo dei ricercatori dell'Advanced Technologies Group di Uber, l'Università di Toronto e UC Berkeley è stato pre-pubblicato su arXiv, introducendo una nuova tecnica per prevedere il comportamento dei pedoni chiamata rete a flusso residuo discreto (DRF-NET). Secondo i ricercatori, questa rete neurale può fare previsioni sul futuro comportamento dei pedoni catturando l'incertezza intrinseca nella previsione del movimento a lungo raggio.
"La nostra rete appresa cattura efficacemente i posteriori multimodali rispetto al futuro movimento umano prevedendo e aggiornando e distribuzione discretizzata su posizioni spaziali, " hanno scritto i ricercatori nel loro articolo.
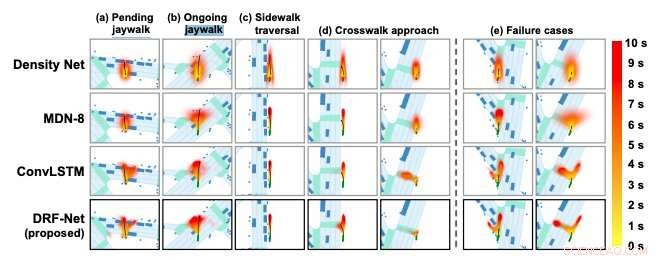
Una delle cifre del recente articolo che mostra le previsioni pedonali del modello. Credito:Jain et al.
I ricercatori hanno espresso convinzioni sulle posizioni future dei pedoni attraverso distribuzioni categoriali che rappresentano lo spazio. Hanno quindi utilizzato queste distribuzioni per pianificare e ottimizzare i percorsi per i veicoli a guida autonoma, che tengono conto delle posizioni attese dei pedoni.
in primo luogo, la rete DTF-NET introdotta nel loro articolo rasterizza immagini di mappe stradali, il che significa che li converte in un'immagine composta da pixel discreti. I comportamenti dei pedoni sono così codificati in un'immagine rasterizzata a volo d'uccello, che è allineato con una mappa semantica dettagliata.
Successivamente, la rete estrae dalle immagini rasterizzate caratteristiche particolarmente utili per prevedere il comportamento dei pedoni. Finalmente, i ricercatori hanno addestrato il loro modello per prevedere il comportamento futuro dei pedoni sulla strada in base a queste caratteristiche.
Hanno addestrato e valutato la loro rete neurale utilizzando un set di dati su larga scala che avevano precedentemente compilato, che contiene registrazioni del mondo reale con annotazioni di oggetti e tracce basate sul rilevamento online, raccolti in diverse città del Nord America. Queste registrazioni includono traiettorie pedonali che sono state annotate manualmente dai ricercatori a 360 gradi, Visualizzazione a 120 metri di distanza utilizzando un sensore LiDAR a bordo del veicolo.
Nelle valutazioni effettuate dai ricercatori, la tecnica DTF-NET ha funzionato bene, superando molti altri metodi di base per prevedere il comportamento dei pedoni. Questo metodo potrebbe quindi potenzialmente aiutare a migliorare le prestazioni dei veicoli a guida autonoma di Uber, allowing them to anticipate the movements of pedestrians and plan their paths accordingly.
"The strong performance of DRF-NET's discrete predictions is very promising for cost-based and constrained robotic planning, " hanno scritto i ricercatori.
interessante, the pedestrian behaviors processed and predicted by the DTF-NET network, highlighted in one of the recent paper's figures, include 'pending jaywalk, ' 'ongoing jaywalk' and 'sidewalk traversal, ' as well as crosswalk. This seems somewhat ironic, as among other things, the recent documents released by NTSB highlighted the inability of Uber's self-driving vehicle to detect jaywalking pedestrians at the time of the crash in Arizona.
Only time will tell whether the DRF-NET network or other techniques will actually be able to improve the ability of self-driving vehicles to detect pedestrians. Per ora, però, one thing seems clear:Significant advancements in AI and better techniques for detecting pedestrians will be necessary before self-driving vehicles can be safely put on the road.
© 2019 Scienza X Rete