MARTY, la DeLorean alla deriva autonoma. Credito:Jonathan Goh
Quando la DeLorean si fermò e la nuvola di fumo di pneumatici si diradò, Jon Goh ha sbirciato fuori dalla scheggia del finestrino del passeggero per vedere dozzine di spettatori riuniti che applaudivano e battevano il cinque per il successo del test.
La folla, e anticipazione, aveva costruito per tutto il pomeriggio, mentre Dio, un recente dottorato di ricerca in ingegneria meccanica. laureato a Stanford, aveva delineato un percorso a ostacoli lungo un chilometro in coni di traffico a Thunderhill Raceway nel nord della California. Il sole stava tramontando velocemente, ma Goh e il suo copilota, un altro studente universitario di nome Tushar Goel, non vedevo l'ora che arrivasse la mattina per provare il percorso tortuoso. Oltretutto, MARTY, l'autista, non aveva bisogno di vedere la traccia:aveva bisogno solo delle coordinate GPS e degli algoritmi sul laptop di Goh per tracciare il suo percorso.
MARTY è una DeLorean del 1981 che Goh e i suoi colleghi del Dynamic Design Lab di Stanford hanno convertito in una completamente elettrica, auto alla deriva autonoma. Quattro anni fa, MARTY è andato alla deriva - lo stile di guida in cui l'auto si muove in avanti anche se è puntata di lato - attraverso le sue prime ciambelle con una precisione disumana. Da allora, Goh e il team sono stati impegnati a saldare e programmare per preparare MARTY ad applicare quelle abilità di base di drifting a un intenso corso di guida, e incredibilmente tutto aveva funzionato perfettamente. MARTY si è fatto strada tra curve e rapidi zig e zag in pochi minuti, sollevando fumo e pezzi di gomma, senza intaccare un solo cono lungo il percorso.
Mentre il tifo continuava, la soddisfazione travolse Goh. Completare il corso "MARTYkhana" al primo tentativo è stato fantastico, ma sapeva che i dati unici raccolti dalla corsa avrebbero potuto trasformare le capacità dei sistemi di guida autonoma presenti nelle auto di oggi.
Superare i limiti per avere il controllo
MARTYkhana, un riff sul formato di corse di autocross "gymkhana" considerato il test principale dell'abilità di un pilota, non è certo un'acrobazia. Condurre ricerche in alta velocità, condizioni di guida complicate come questa è un approccio fondamentale del Dynamic Design Lab, dove l'ingegnere meccanico Chris Gerdes e i suoi studenti guidano auto autonome in situazioni di guida impegnative che solo i migliori guidatori umani possono gestire in modo affidabile. I computer di bordo misurano la risposta dell'auto su dozzine di corse, e gli ingegneri traducono quelle dinamiche del veicolo in un software che un giorno potrebbe aiutare la tua auto a schivare rapidamente un pedone che sfreccia sulla strada.
La maggior parte dei veicoli automatizzati su strada sono stati progettati per gestire casi di guida più semplici, come rimanere in una corsia o mantenere la giusta distanza dalle altre auto.
"Stiamo cercando di sviluppare veicoli automatizzati in grado di gestire manovre di emergenza o superfici scivolose come ghiaccio o neve, " Gerdes ha detto. "Vorremmo sviluppare veicoli automatizzati in grado di utilizzare tutto l'attrito tra il pneumatico e la strada per tenere l'auto fuori pericolo. Vogliamo che l'auto sia in grado di evitare qualsiasi incidente evitabile secondo le leggi della fisica".
Addestrare un'auto autonoma alla derapata è un metodo sorprendentemente buono per testare la capacità di un'auto di guidare in modo evasivo. In condizioni tipiche, un guidatore punta l'auto dove vuole andare e usa i pedali dell'acceleratore e del freno per controllare la velocità. Quando si va alla deriva, intenzionalmente o meno, questo esce dalla finestra.
"Improvvisamente la macchina è puntata in una direzione molto diversa da dove sta andando. Il tuo volante controlla la velocità, l'acceleratore influisce sulla rotazione, e i freni possono influire sulla velocità con cui cambi direzione, " Goh ha detto. "Devi capire come usare questi input familiari in un modo molto diverso per controllare l'auto, e la maggior parte dei conducenti non è molto brava a gestire l'auto quando diventa così instabile".

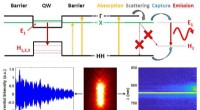
Cornici sovrapposte, a intervalli di 0,5 secondi, da un video dall'alto di un successo, esperimento di drifting "Figura 8" completamente autonomo su MARTY. Questo esperimento viene condotto a una velocità di 50 km/h, e passa attraverso +/- 40 gradi di scivolata laterale in circa un secondo. Credito:Jonathan Goh
I veicoli commerciali sono dotati di sistemi di controllo elettronico della stabilità che cercano di impedire alle auto di entrare in questi stati instabili, ma è qui che prosperano i vagabondi. Sfruttano questa instabilità per manovrare l'auto in modi più agili e precisi che consentono loro di attraversare uno stretto percorso a ostacoli senza nemmeno sfiorare le barriere.
Studiando le abitudini dei conducenti professionisti e testando quelle stesse manovre di controllo in MARTY, il team di Stanford ha permesso all'auto di utilizzare una gamma più ampia dei suoi limiti fisici per mantenere la stabilità attraverso una gamma più ampia di condizioni, e la matematica coinvolta potrebbe consentire ai sistemi autonomi di manovrare con l'agilità di un pilota di drift in caso di emergenza.
"Attraverso la deriva, siamo in grado di arrivare a esempi estremi di fisica della guida che altrimenti non avremmo, " Goh ha detto. "Se possiamo conquistare come controllare in sicurezza l'auto negli scenari più stabili e più instabili, diventa più facile collegare tutti i punti intermedi."
Una trasformazione dal basso
Quando Gerdes e Goh hanno deciso di costruire MARTY, che sta per Multiple Actuator Research Test bed per il controllo dell'imbardata, sapevano di volere un'auto con trazione posteriore che avrebbe consentito la libertà per infiniti aggiornamenti, e volevano che avesse un certo fattore cool.
"Per come la vediamo noi, se hai intenzione di costruire un veicolo di ricerca, perché non farlo con un certo stile?" Gerdes ama dire, accennando alla linea classica di Ritorno al futuro.
Una DeLorean ha spuntato tutte quelle scatole. Se dovessi guardare sotto l'iconico guscio in acciaio inossidabile di MARTY, a questo punto troverai pochissima DeLorean. La trasmissione sottodimensionata è stata sostituita da robuste batterie e motori elettrici sviluppati da Renovo. La sospensione originale era troppo morbida per mantenere una derapata decente, quindi il team ha progettato e fabbricato componenti in grado di sostenere il compito. Comandi meccanici per lo sterzo, frenata e strozzamento sono stati sostituiti da sistemi elettronici. C'è un roll-bar.
Un paio di antenne GPS punteggiano il tetto e tracciano la posizione dell'auto entro un pollice, e l'intera operazione viene eseguita su computer nascosti dietro i sedili. Entrando nel layout del corso, MARTY calcola il percorso di derapata più fluido possibile in pochi secondi. Ci vuole molto più tempo per impostare i coni stradali.
Guida come un essere umano
Il primo articolo di giornale relativo a MARTY è stato pubblicato di recente e definisce il sistema che l'auto utilizza per controllare il proprio angolo e la propria posizione con precisione in condizioni di derapata di base. Il design del controller era molto più semplice del previsto, Dio ha detto, ed è ad accesso aperto per consentire ad altri di ripetere l'approccio.
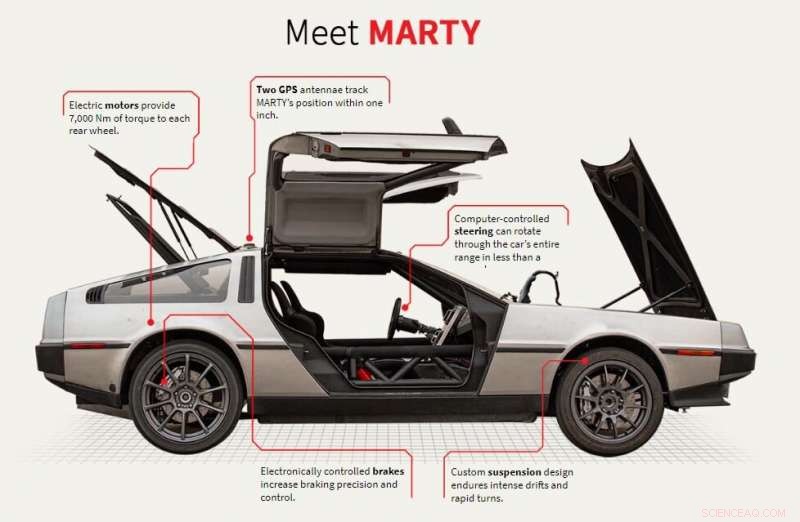
Credito:Infografica di Yvonne Tang; foto originale di Jonathan Goh
Altri documenti in lavorazione descriveranno in dettaglio le tecniche sviluppate dal team che utilizzano l'intera gamma di sterzo della vettura, che è ciò che gli consente di completare percorsi più complicati, come MARTYkhana. E il team continua a sperimentare come l'integrazione dei freni anteriori e posteriori possa aumentare ulteriormente le capacità del sistema autonomo. Del tutto, questo lavoro permette a MARTY di fare virate più strette in successione ancora più velocemente, che lo aiuterà ulteriormente ad addestrarlo a navigare in condizioni estreme.
"I risultati finora sono piuttosto eccezionali, " Gerdes ha detto. "I sistemi di controllo della stabilità delle auto moderne limitano il controllo del conducente a una gamma molto ristretta del potenziale della vettura. Con MARTY siamo stati in grado di definire più ampiamente la gamma di condizioni in cui possiamo operare in sicurezza, e abbiamo la capacità di stabilizzare la vettura in queste condizioni instabili".
Andare alla deriva è tanto una forma d'arte quanto un'abilità tecnica, un dettaglio che Gerdes ha sottolineato fin dall'inizio. Ecco perché si rallegrerà di quanto sia impressionato dal fatto che i suoi studenti abbiano programmato MARTY per andare alla pari con i piloti professionisti.
"È davvero impressionante quanto l'auto possa essere scattante in queste transizioni e anche quanto possa essere precisa, " ha detto Fredric Asbo, il campione del mondo di Formula Drift 2015. "Perché questo è il trucco come pilota. È quello che stiamo cercando di capire tutti."