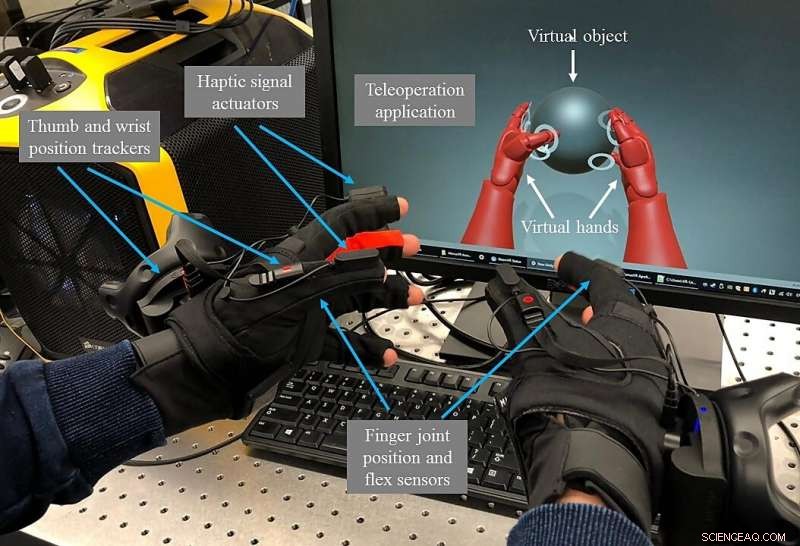
Configurazione sperimentale che dimostra le applicazioni da uomo a macchina. Credito:S. Mondal, et al., L'Università di Melbourne
Un Internet tattile è potenzialmente la fase successiva dell'Internet delle cose, in cui gli esseri umani possono toccare e interagire con oggetti remoti o virtuali mentre sperimentano un feedback tattile realistico.
Un team di ricercatori guidati da Elaine Wong dell'Università di Melbourne, Australia, ha sviluppato un metodo per migliorare le esperienze di feedback tattile nelle applicazioni uomo-macchina tipiche di Internet tattile. I ricercatori ritengono che il loro metodo possa essere utilizzato per prevedere un feedback adeguato in applicazioni che vanno dall'assistenza sanitaria elettronica ai giochi di realtà virtuale.
Wong e i suoi colleghi presenteranno il modulo proposto, che utilizza una rete neurale artificiale per prevedere il materiale toccato, alla Conferenza ed Esposizione sulla Comunicazione in Fibra Ottica (OFC), che si terrà dall'8 al 12 marzo 2020 presso il San Diego Convention Center, California, STATI UNITI D'AMERICA.
A seconda della dinamicità dell'interazione, un'applicazione ottimale da uomo a macchina può richiedere un tempo di risposta della rete di appena un millisecondo.
"Questi tempi di risposta impongono un limite alla distanza tra uomini e macchine, " disse Wong. "Quindi, soluzioni per separare questa distanza dal tempo di risposta della rete sono fondamentali per realizzare l'Internet tattile".
Come passo verso questo obiettivo, il team ha addestrato un algoritmo di apprendimento per rinforzo per indovinare il feedback tattile appropriato in un sistema da uomo a macchina prima che sia noto il feedback corretto. Il modulo, chiamato Event-based HAptic SAmple Forecast (EHASAF), accelera il processo fornendo una risposta al tocco basata su una previsione probabilistica del materiale con cui l'utente sta interagendo.
"Per facilitare le applicazioni uomo-macchina su reti a lunga distanza, ci affidiamo all'intelligenza artificiale per superare gli effetti della lunga latenza di propagazione, " disse Sourav Mondal, un autore sulla carta.
Una volta identificato il materiale effettivo, l'unità adatta e aggiorna la sua distribuzione di probabilità per aiutare a scegliere il feedback corretto guardando avanti.
Il gruppo ha testato il modulo EHASAF con un paio di guanti per realtà virtuale usati da un essere umano per toccare una palla virtuale. I guanti contengono sensori sulle dita e sui polsi per rilevare i tocchi e tracciare i movimenti, forze e l'orientamento della mano.
A seconda di quale palla materiale l'utente sceglie di toccare delle quattro opzioni virtuali fornite, il feedback dal guanto dovrebbe variare. Per esempio, una palla di metallo sarà più solida di una palla di schiuma. Quando una rete neurale determina che una delle dita ha toccato la palla, il modulo EHASAF inizia a scorrere le opzioni di feedback per generare fino a quando non risolve il materiale effettivo della palla scelta.
Attualmente, con quattro materiali, l'accuratezza della previsione del modulo è di circa il 97%.
"Pensiamo che sia possibile migliorare l'accuratezza delle previsioni con un numero maggiore di materiali, ", ha detto Mondal. "Tuttavia, sono necessari modelli più sofisticati basati sull'intelligenza artificiale per raggiungere questo obiettivo".
"Modelli sempre più sofisticati con prestazioni migliorate possono essere sviluppati sulla base dell'idea fondamentale del nostro modulo EHSAF proposto, " ha detto Mondal.
Questi risultati e ulteriori ricerche saranno presentati in loco all'OFC 2020.