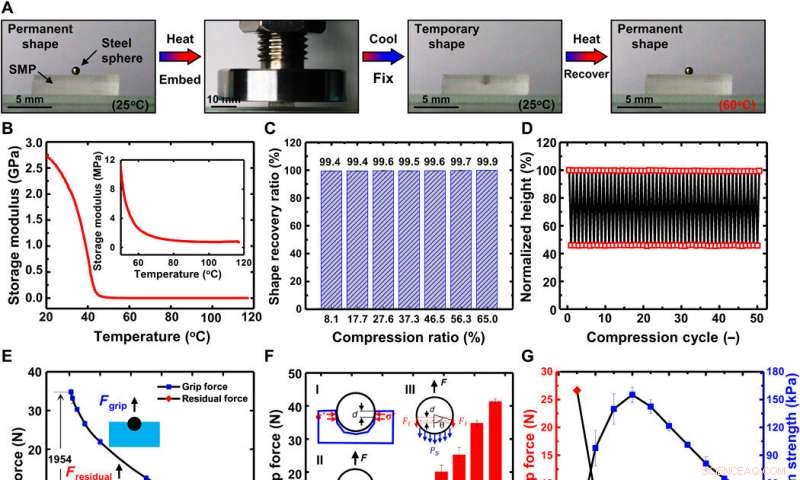
Caratterizzazione del materiale epossidico SMP e della pinza SMP. (A) Dimostrazione del fissaggio temporaneo della forma e dell'effetto memoria di forma permanente dell'SMP. (B) Modulo di stoccaggio rispetto alla temperatura del materiale SMP. Inserti:ingrandimento del modulo di accumulo rispetto alla temperatura a temperature più elevate. (C) Rapporto di recupero della forma dell'SMP con diversi rapporti di compressione. (D) Prestazioni dell'SMP sotto compressione ripetuta. (E) Confronto delle forze di presa e residue in funzione delle velocità di presa. Parametri per la misurazione della forza di presa:temperatura per l'incasso, 120°C; temperatura per tirare, 30°C; profondità di inclusione, 3mm; diametro del penetratore, 5mm. (F) Influenza dell'angolo di inclusione sulla forza di presa (temperatura per l'inclusione, 120°C; temperatura per tirare, 30°C; diametro del penetratore, 5mm; velocità di presa, 100 micron/s). I riquadri mostrano il meccanismo sottostante della presa. (I e II) Illustrazioni del profilo che mostrano l'evoluzione della configurazione della pinza SMP e del sistema di sfere incorporato durante il processo di presa. (III) Diagramma delle forze della sfera incastonata in direzione verticale. (G) Influenza della temperatura sulla forza di presa. La linea con i rombi rossi dà la forza di presa, mentre la linea contrassegnata da quadrati blu mostra l'adesione. La forza di presa si ottiene dalle prove di inserimento e di estrazione (temperatura di inserimento, 120°C; temperatura per tirare, 30°C; diametro del penetratore, 5mm; profondità di inclusione, 3mm; velocità di presa, 1000 micron/s), mentre la forza di adesione a parità di velocità di separazione (1000 μm/s) è ottenuta mediante test di trazione tra una lastra di vetro e l'SMP. Credito fotografico:Changhong Linghu, Università di Zhejiang. Credito: Progressi scientifici (2020). DOI:10.1126/sciadv.aay5120
Un team di ricercatori della Zhejiang University ha creato una nuova pinza robotica utilizzando un polimero a memoria di forma. Nel loro articolo pubblicato sulla rivista Progressi scientifici , il gruppo descrive il materiale, il suo utilizzo come pinza, e come ha funzionato.
Negli ultimi decenni, gli scienziati hanno utilizzato una varietà di approcci per dare a un robot la capacità di raccogliere e manipolare oggetti e di riposizionarli, il tutto senza danneggiare l'oggetto. Sono stati fatti molti progressi nelle pinze robotiche, dovuto principalmente ai progressi nella tecnologia dei microchip, ma ci sono ancora molti margini di miglioramento. Una delle sfide più grandi è lo sviluppo di una pinza in grado di raccogliere e manipolare oggetti di quasi tutte le forme, misure differenti, e realizzati con materiali diversi. Creare una pinza simile a una mano umana in grado di raccogliere uno spillo da un tavolo, portare un uovo crudo attraverso una stanza o legare un nastro tra i capelli di un bambino, richiede una pinza molto sofisticata e il software associato. In questo nuovo sforzo, i ricercatori hanno eliminato la necessità di sofisticazione adottando un approccio completamente diverso.
Ricerche precedenti hanno dimostrato che quando alcuni polimeri vengono riscaldati, si espandono leggermente e crescono morbidi. I ricercatori hanno utilizzato entrambe le proprietà per creare la loro nuova pinza. Hanno creato una pinza polimerica che si ammorbidisce quando viene riscaldata a 45°C e poi si indurisce di nuovo quando esposta a 25°C. La sua forma di base è cuboide (un rettangolo 3D). Hanno quindi fissato la pinza a un semplice braccio che era in grado di posizionare la pinza contro un piano del tavolo o sollevarla appena sopra il tavolo, abbastanza da consentire il posizionamento di vari oggetti sotto.
Il test prevedeva il posizionamento di un oggetto come una piccola sfera d'acciaio sotto la pinza e il riscaldamento dell'intero apparato in un involucro a 45°C. Dopo pochi minuti, il polimero si era ammorbidito. I ricercatori hanno quindi abbassato la pinza sull'oggetto, permettendo all'oggetto di essere inglobato, simile a mettere un panetto di burro ammorbidito su una forchetta. La temperatura nel recinto è stata quindi ridotta a 25°C. A quel punto, il polimero si è leggermente ristretto, afferrando l'oggetto mentre si stabilizzava. I ricercatori hanno quindi sollevato la pinza e l'oggetto che conteneva. Per riposizionare l'oggetto, i ricercatori hanno abbassato la pinza sul tavolo e aumentato la temperatura nel recinto a 45°C.
© 2020 Scienza X Rete