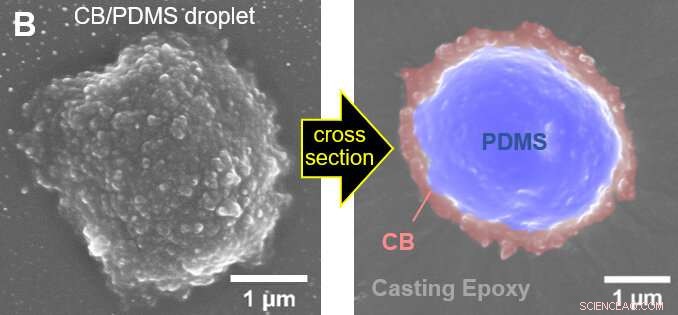
Una gocciolina dell'emulsione polimerizzata nel mezzo di etanolo prima (a sinistra) e dopo che l'etanolo è evaporato (a destra). L'immagine in sezione trasversale è in falsi colori per evidenziare il nucleo polimerico (blu) e il guscio di nanoparticelle nerofumo (rosso). Credito:Kim et al., Sci. Robot. 5, eaay3604 (2020)
Un numero crescente di aziende e gruppi di ricerca in tutto il mondo sta ora sviluppando sensori conformi basati su materiali compositi, che può avere una vasta gamma di possibili applicazioni. Materiali compositi, quelli costituiti da due o più sostanze, spesso hanno proprietà uniche e vantaggiose che differiscono da quelle dei loro singoli componenti.
Studi precedenti hanno scoperto che i materiali compositi contenenti matrici polimeriche e riempitivi conduttivi sono particolarmente promettenti per lo sviluppo di sensori conformi, in quanto possono essere stampati su larga scala. Un vantaggio chiave dei sensori realizzati con questa classe di materiali è che possono essere integrati in sistemi geometricamente complessi o flessibili, come dispositivi indossabili e robot morbidi.
I ricercatori della Yale University hanno recentemente introdotto un approccio che potrebbe consentire la produzione sostenibile di sensori conformi per applicazioni di robotica morbida. Questo approccio, presentato in a Robotica scientifica carta, prevede l'uso di un'emulsione Pickering a base di etanolo che coagula spontaneamente, creando un composito conduttivo che può essere facilmente stampato su sistemi robotici morbidi.
"La stampa di materiali compositi generalmente comporta l'uso di solventi, come toluene o cicloesano, sciogliere la resina polimerica e assottigliare il materiale fino a ottenere una viscosità stampabile, " hanno scritto i ricercatori nel loro articolo. "Tuttavia, tali solventi causano il rigonfiamento e la decomposizione della maggior parte dei substrati polimerici, limitare l'utilità dei materiali compositi. Inoltre, molti solventi convenzionali sono tossici o presentano comunque rischi per la salute."
Consapevole delle difficoltà incontrate quando si cerca di stampare materiali compositi utilizzando solventi, i ricercatori di Yale hanno ideato un nuovo approccio che potrebbe consentire la produzione di sensori in modo più efficiente e sostenibile. La strategia che hanno sviluppato si basa sull'uso di un'emulsione Pickering a base di etanolo che coagula spontaneamente, creando un composito conduttivo che può essere stampato in diversi tipi di sensori.
"L'emulsione Pickering è costituita da precursori polimerici emulsionati stabilizzati da nanoparticelle conduttive in un vettore di etanolo, " hanno scritto i ricercatori nel loro articolo. "Dopo l'evaporazione dell'etanolo, i precursori vengono rilasciati, che poi si fondono tra reti di nanoparticelle e polimerizzano spontaneamente a contatto con l'umidità atmosferica".
Una volta delineata la loro nuova strategia di produzione di sensori, i ricercatori hanno stampato l'emulsione Pickering autocoagulante in una serie di sistemi polimerici, compresi i materiali tessili tradizionali e gli attuatori morbidi. La sostanza conduttiva che usavano conferiva a questi sistemi capacità di rilevamento, risultando in diversi tipi di sensori conformi.
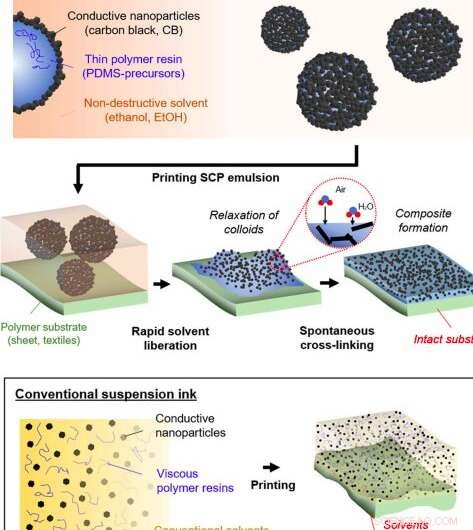
Illustrazione che mostra come funziona l'emulsione SCP e il processo di stampa. Credito:Kim et al.
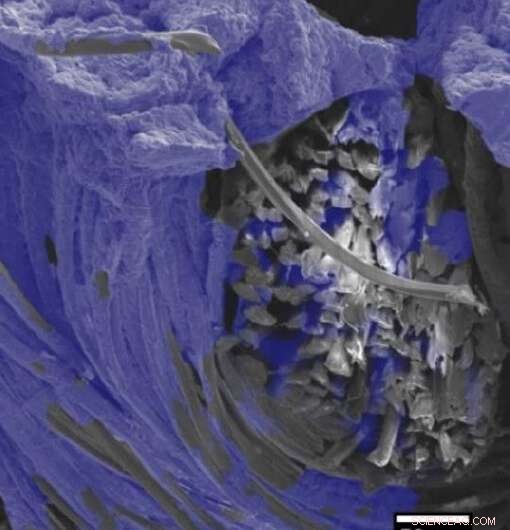
Uno sguardo ravvicinato ai tessuti infusi di emulsione (grigio). L'emulsione è indicata in blu. Credito:Kim et al., Sci. Robot. 5, eaay3604 (2020)
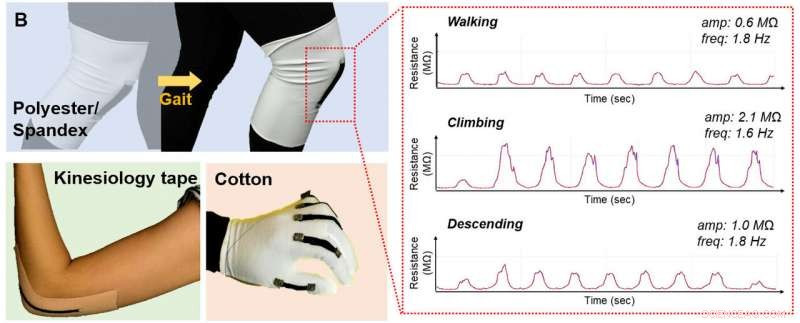
Semplicemente "dipingendo" l'emulsione su indumenti e nastro kinesiologico può portare a dispositivi indossabili sensibili alla deformazione già pronti. Credito:Kim et al., Sci. Robot. 5, eaay3604 (2020)
Finora, i ricercatori hanno utilizzato il loro approccio di produzione per creare un nastro kinesiologico infuso con composito, ginocchiere e guanti di cotone. Hanno anche applicato la stessa strategia per fabbricare pelli robotiche morbide, soprannominato OmniSkins, stampando l'emulsione conduttiva su tessuto di mussola e applicandovi degli attuatori.
Nelle prove preliminari, i sistemi di rilevamento a base di emulsione Pickering sviluppati dai ricercatori hanno raggiunto una notevole sensibilità alla deformazione e un'isteresi trascurabile, che sono proprietà altamente desiderabili per la maggior parte delle tecnologie indossabili e delle applicazioni di robotica morbida. Nel futuro, la nuova strategia di produzione introdotta in questo recente documento potrebbe consentire uno sviluppo più sostenibile di tecnologie di rilevamento innovative e altamente performanti, tra cui morbide pelli robotiche e capi di abbigliamento con capacità di rilevamento.
© 2020 Scienza X Rete