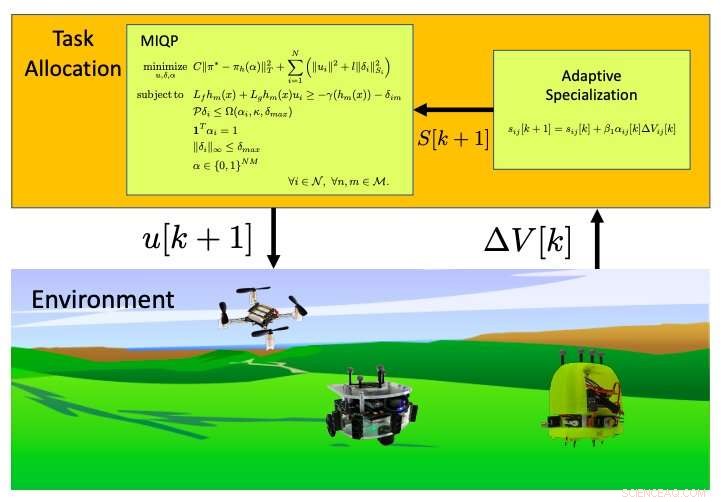
Una figura che illustra il ciclo di feedback proposto tra il quadro di assegnazione delle attività, l'ambiente, e l'aggiornamento della specializzazione adattiva. L'efficacia dei robot in ogni compito è misurata come ∆V [k], che è passato alla legge di aggiornamento della specializzazione adattativa. Una volta calcolati i nuovi parametri di specializzazione, l'assegnazione del compito MIQP viene risolta e gli input vengono inviati ai robot. Credito:Emam et al.
Negli ultimi anni, i robot sono diventati sempre più sofisticati, quindi ora sono in grado di completare un'ampia varietà di compiti. Mentre alcuni robot sono progettati per funzionare individualmente, per esempio fornendo assistenza di base nelle case delle persone, altri potrebbero essere più efficienti se distribuiti in team.
Durante le missioni di ricerca e salvataggio, per esempio dopo disastri naturali, i robot potrebbero essere più efficaci come squadra, in quanto potrebbero consegnare rifornimenti o cercare i sopravvissuti più velocemente, coprendo aree geografiche più vaste. Per completare le missioni come una squadra nel modo più efficiente, però, i robot dovrebbero essere in grado di cooperare bene e distribuire efficacemente compiti diversi tra loro.
Con questo in testa, i ricercatori del Georgia Institute of Technology (Georgia Tech) hanno recentemente sviluppato un quadro per l'assegnazione di compiti adattivi durante le missioni che devono essere completate da un team di robot. Il loro quadro, presentato in un articolo pre-pubblicato su arXiv, possono assegnare compiti ai robot in base alle loro capacità e caratteristiche uniche.
"I team di robot sono concepiti per operare in ambienti dinamici e questo documento propone una regola aggiornata che consente ai robot di sapere quanto sono adatti a ciascuno dei vari compiti a cui vengono assegnati al volo, "Youssef un Emam, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore.
Il framework sviluppato dai ricercatori si basa su una tecnica di allocazione delle attività per sistemi multi-robot eterogenei che hanno introdotto in un precedente documento. Questa strategia precedentemente ideata prevede l'uso di un algoritmo che tiene conto delle differenze nelle capacità dei singoli robot e assegna le attività di conseguenza. L'assegnazione e l'esecuzione di questi compiti avvengono contemporaneamente.
"Il nostro framework risolve i problemi di ottimizzazione online, dire ai singoli robot come dare la priorità ai loro contributi ai vari compiti che devono completare (ad es. assegnazione dei compiti), e come farlo (es. esecuzione del compito), " ha detto Emam.
Nel loro studio, Emam e i suoi colleghi hanno costruito sulla strategia di allocazione delle attività che avevano precedentemente sviluppato, rendendolo più reattivo ai cambiamenti nell'ambiente circostante dei robot. A differenza della sua versione precedente, la loro nuova struttura non richiede un modello esplicito dell'ambiente o delle capacità del robot che sono sconosciute. Anziché, considera principalmente i progressi collettivi che il team di robot ha compiuto in una determinata missione e le prestazioni di ciascun robot sui singoli compiti.
"Nel nostro recente studio, abbiamo sviluppato una legge di feedback che rende il quadro precedentemente sviluppato adattivo ai disturbi ambientali, " Ha spiegato Emam. "Ciò significa che anche se il robot non ha una conoscenza perfetta di quanto sia adatto a ciascuno dei compiti, lo imparerà al volo."
I ricercatori hanno valutato la loro struttura in una serie di simulazioni e hanno scoperto che ha ottenuto risultati molto promettenti. In questi esperimenti, il loro approccio ha consentito un'efficace allocazione dei compiti tra i robot in una varietà di condizioni ambientali, anche nei casi in cui le capacità dei singoli robot erano sconosciute prima del loro dispiegamento.
Nel futuro, il quadro di assegnazione ed esecuzione delle attività sviluppato da Emam e dai suoi colleghi potrebbe migliorare la cooperazione tra i robot che vengono distribuiti come una squadra, migliorare le proprie prestazioni collettive. Ciò potrebbe in definitiva facilitare la mobilitazione su larga scala dei robot durante le missioni di ricerca e soccorso.
"Stiamo attualmente lavorando per estendere il framework per includere le funzionalità di ciascun robot (ad esempio sensori, attuatori), in modo da poter modellare gli errori delle funzionalità online in modo più esplicito, " ha detto Emam. "Inoltre, un altro aspetto che stiamo esaminando è la distribuzione dei calcoli tra i robot (decentrati)."
© 2020 Scienza X Rete