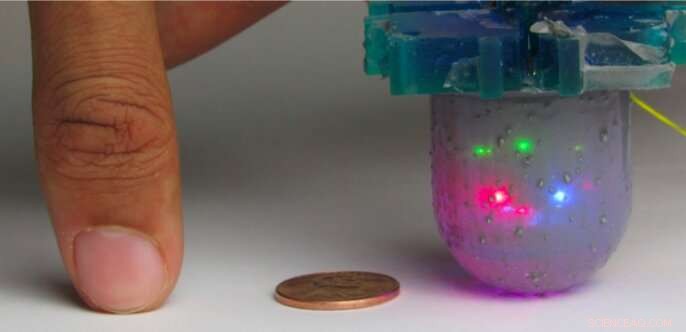
Un pollice umano accanto a OmniTact e un centesimo americano; che mostra la dimensione del sensore. Credito:Padmanabha et al.
Negli ultimi anni, ricercatori di tutto il mondo hanno cercato di sviluppare sensori in grado di replicare il senso del tatto degli umani nei robot e migliorare le loro capacità di manipolazione. Mentre alcuni di questi sensori hanno ottenuto risultati notevoli, la maggior parte delle soluzioni esistenti ha piccoli campi sensibili o può raccogliere solo immagini a bassa risoluzione.
Un team di ricercatori dell'UC Berkeley ha recentemente sviluppato un nuovo sensore tattile multidirezionale, chiamato OmniTact, che supera alcune delle limitazioni dei sensori precedentemente sviluppati. OmniTact, presentato in un documento pre-pubblicato su arXiv e che sarà presentato all'ICRA 2020, agisce come un polpastrello artificiale che consente ai robot di percepire le proprietà degli oggetti che sta tenendo o manipolando.
"Il nostro laboratorio ha riconosciuto la necessità di un sensore per attività generali di manipolazione robotica con capacità estese rispetto agli attuali sensori tattili, " Frederik Ebert, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. '"I sensori tattili esistenti sono piatti, hanno piccoli campi sensibili o forniscono solo segnali a bassa risoluzione. Per esempio, il sensore GelSight fornisce un'alta risoluzione (cioè, 400x400 pixel) ma è grande e piatto, fornendo sensibilità su un solo lato, mentre il sensore OptoForce è curvo, ma fornisce solo letture di forza in un singolo punto."
OmniTact, il sensore sviluppato da Ebert e dai suoi colleghi, è un adattamento di GelSight, un sensore tattile creato dai ricercatori del MIT e dell'UC Berkeley. GelSight può generare mappe 3D dettagliate della superficie di un oggetto e rilevare alcune delle sue caratteristiche.
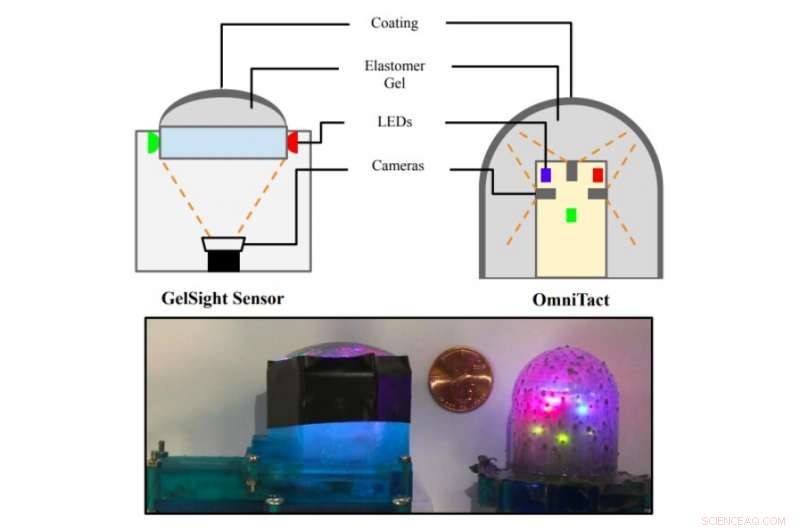
Un'illustrazione e un'immagine che spiegano le differenze fondamentali tra il sensore GelSight e OmniTact. Credito:Padmanabha et al.
A differenza di GelSight, OmniTact è multidirezionale, il che significa che tutti i suoi lati hanno capacità di rilevamento. Inoltre, può fornire letture ad alta risoluzione, è molto compatto e ha una forma curva. Quando integrato in una pinza o in una mano robotica, il sensore agisce come un dito artificiale sensibile, " consentendo al robot di manipolare e percepire un'ampia gamma di oggetti di forma e dimensioni variabili.
OmniTact è stato realizzato incorporando più microcamere in una pelle artificiale in gel di silicone. Le telecamere rilevano deformazioni multidirezionali della pelle a base di gel, producendo un segnale ricco che può quindi essere analizzato mediante visione artificiale e tecniche di elaborazione delle immagini per dedurre informazioni sugli oggetti che un robot sta manipolando.
"Il nostro team utilizza approcci basati sull'apprendimento per utilizzare il feedback ad alta risoluzione ed evitare procedure di calibrazione manuale, "Akhil Padmanabha, un altro ricercatore coinvolto nello studio, ha detto a TechXplore. "OmniTact fornisce il rilevamento tattile su tutti i lati del sensore, consentendo così ai robot di avere accesso al feedback tattile mentre entrano in contatto con gli oggetti in qualsiasi direzione".
Eberto, Padmanabha e i loro colleghi hanno valutato le prestazioni del loro sensore in un compito abbastanza impegnativo, dove un robot doveva inserire un connettore elettrico in una presa. Hanno anche testato la sua capacità di dedurre l'angolo di contatto di un dito mentre premeva contro un determinato oggetto. In queste prime valutazioni, OmniTact ha ottenuto risultati notevoli, superando sia un sensore tattile che è sensibile solo su un lato sia un altro sensore multidirezionale nel compito di stima dello stato.
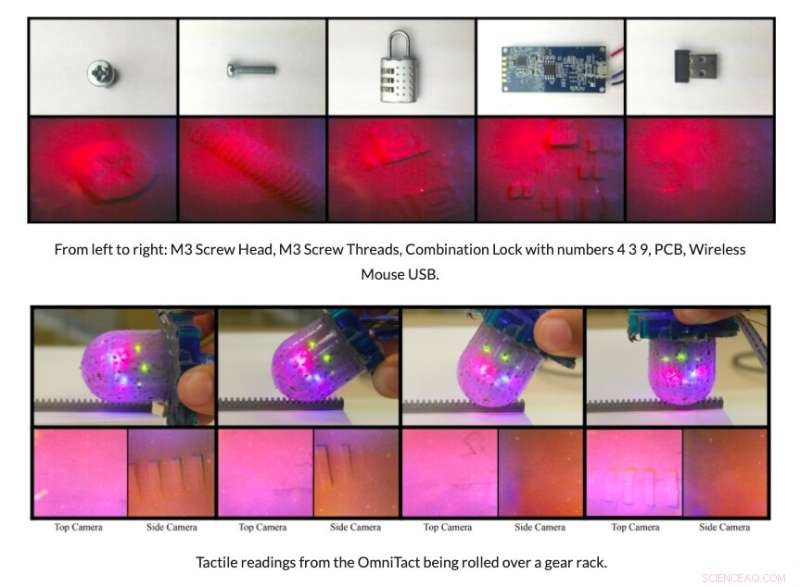
Credito:Padmanabha et al.
"Attraverso i nostri esperimenti con OmniTact, abbiamo scoperto che multidirezionale, il rilevamento tattile ad alta risoluzione consente determinate attività di manipolazione a grana fine, come l'attività di inserimento del connettore che abbiamo presentato, "Stefano Tian, un altro ricercatore coinvolto nello studio, ha detto a TechXplore. "Sospettiamo che in futuro il rilevamento tattile multidirezionale potrebbe essere un elemento essenziale nella manipolazione robotica generica oltre ad applicazioni come la teleoperazione robotica in chirurgia, così come nelle missioni marittime e spaziali."
I ricercatori hanno costruito il loro sensore utilizzando microcamere che sono tipicamente utilizzate negli endoscopi, colando il gel di silicone direttamente sulle fotocamere. Di conseguenza, OmniTact è molto più compatto dei sensori GelSight sviluppati in precedenza e potrebbe quindi avere una gamma più ampia di possibili applicazioni. Nel futuro, potrebbe aprire la strada alla creazione di nuovi robot con capacità di rilevamento più sofisticate.
"Abbiamo in programma di rendere OmniTact più economico e compatto, permettendogli di essere utilizzato in una gamma più ampia di compiti. Il nostro team prevede inoltre di condurre ulteriori ricerche sulla manipolazione robotica che informeranno le future generazioni di sensori tattili, "Ha detto Padmanabha.
© 2020 Scienza X Rete














