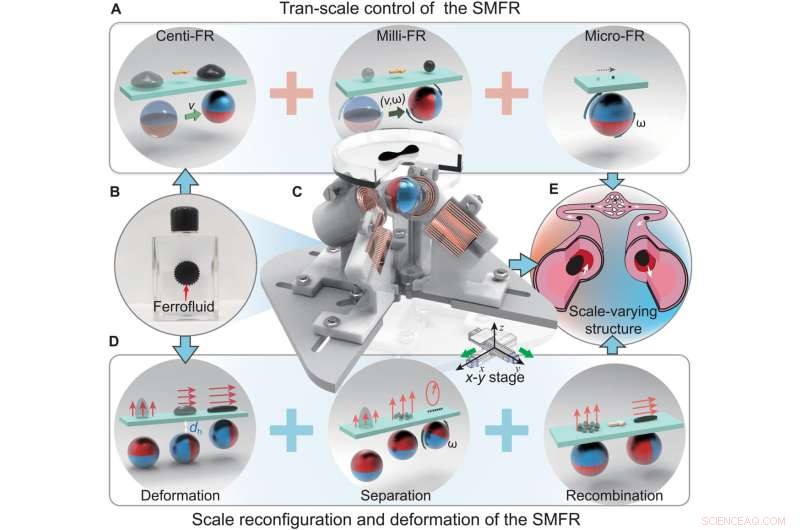
Panoramica della manovra trans-scala e delle strategie di riconfigurazione della scala dei robot ferrofluidici miniaturizzati riconfigurabili in scala (SMFR). (A) Controllo trans-scala dell'SMFR:locomozione di centi-FR, milli-FR e micro-FR sulla base del gradiente magnetico, rispettivamente del gradiente magnetico e della coppia e solo della coppia magnetica. (B) Comportamenti di risposta delle goccioline di ferrofluido nei campi magnetici. (C) L'SMFR è manipolato da un sistema di attuazione magnetica progettato su misura (il sistema M3RA) composto da quattro elettromagneti, un magnete permanente sferico (SPM) e uno stadio di traslazione motorizzato. Per osservare facilmente la composizione interna del sistema, nascondiamo un quarto della struttura. (D) Deformazione e riconfigurazione in scala dell'SMFR:deformazione per allungamento, riduzione tramite separazione e scalatura tramite ricombinazione. La freccia rossa rappresenta la direzione di polarizzazione del campo magnetico. (E) Tipico scenario applicativo dell'SMFR basato sulla combinazione delle capacità di cui sopra:locomozione in uno spazio fortemente variabile come la rete vascolare. Credito:Progressi scientifici (2022). DOI:10.1126/sciadv.abq1677
Un team di ricercatori della Soochow University, in collaborazione con due colleghi del Max Planck Institute for Intelligent Systems e un altro dell'Harbin Institute of Technology, ha sviluppato un tipo di robot morbido che può essere suddiviso in componenti più piccoli per passare attraverso piccoli spazi e quindi rimontare. Nel loro articolo pubblicato sulla rivista Science Advances , il gruppo descrive come hanno realizzato i loro piccoli robot e suggerisce possibili usi per loro.
Mentre la scienza della robotica continua a maturare, gli ingegneri di tutto il mondo continuano a trovare nuovi modi per realizzarli. In questo nuovo sforzo, i ricercatori hanno ricavato il loro da un ferrofluido (nanoparticelle magnetiche di ossido di ferro) che hanno sospeso in un olio trasparente. Il robot è controllato tramite magneti esterni.
Utilizzando un robot fatto di un materiale che è tenuto insieme solo molto liberamente, osservano i ricercatori, consente l'alterazione della sua forma su richiesta. Applicando più campi magnetici, hanno dimostrato che era possibile dirigere il loro robot attraverso un labirinto, cambiando a volte la sua forma per superare gli ostacoli. Lo hanno costretto ad allungarsi, ad esempio, per infilarsi in uno stretto passaggio. Lo hanno anche rotto in un numero desiderato di parti più piccole per passare attraverso un materiale poroso. In entrambi i casi, il robot è stato poi facilmente riassemblato in un'unica forma rotonda di robot e ha proseguito il suo viaggio. Notano che un tale robot potrebbe essere realizzato in un'ampia varietà di dimensioni.
Il robot potrebbe essere plausibilmente utilizzato in applicazioni mediche come mezzo per trasportare farmaci a parti del corpo di difficile accesso, come nodi polmonari o parti del cervello. I ricercatori riconoscono che per applicazioni pratiche, il progetto dovrebbe superare molti ostacoli, più ovviamente lo sviluppo di un sistema di controllo magnetico in grado di penetrare accuratamente ossa come il cranio. Nel frattempo, altri hanno notato che un tale sistema robotico potrebbe rivelarsi utile nei dispositivi lab-on-a-chip in cui vengono condotti processi chimici per attività come il rilevamento di virus. I piccoli nuovi robot potrebbero forse essere usati per trasportare le sostanze chimiche necessarie per le reazioni. + Esplora ulteriormente
© 2022 Rete Science X