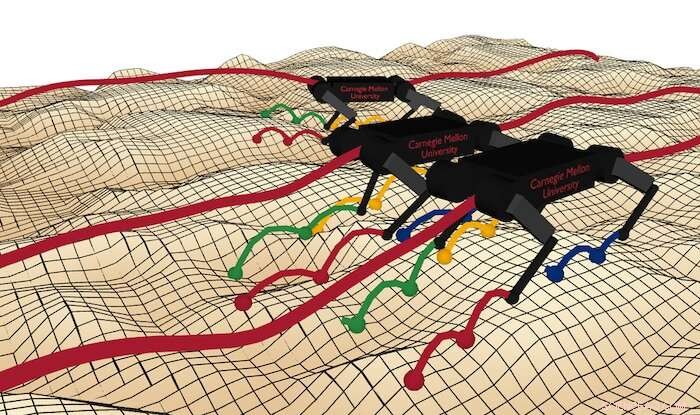
Quad-SDK è un framework open source full-stack per la locomozione quadrupede agile. Credito:Laboratorio di robomeccanica, Carnegie Mellon University
I ricercatori di Carnegie Mellon hanno sviluppato un software open source che consente movimenti più agili nei robot con le gambe.
I robot possono aiutare gli esseri umani in attività come aiutare gli sforzi di ripristino di emergenza o monitorare l'ambiente. Nel caso dei quadrupedi, robot che camminano su quattro gambe, la loro mobilità richiede che molti componenti software funzionino insieme senza problemi. La maggior parte dei ricercatori deve dedicare gran parte del proprio tempo allo sviluppo di infrastrutture di livello inferiore invece di concentrarsi su comportamenti di alto livello.
Il team di Aaron Johnson del Robomeccanica Lab presso il College of Engineering della Carnegie Mellon University ha sperimentato in prima persona queste frustrazioni. I ricercatori hanno spesso dovuto fare affidamento su modelli semplici per il loro lavoro perché le soluzioni software esistenti non erano open source, non fornivano una struttura modulare e mancavano di funzionalità end-to-end.
In un esempio di innovazione nata per necessità, Johnson, professore associato di ingegneria meccanica, e il suo team hanno progettato il proprio stack software di locomozione, Quad-SDK, un framework completo per la locomozione quadrupede agile.
Il design può semplificare il processo di sviluppo per i robotici di tutto il mondo perché utilizza una licenza open source, il che significa che il software può essere utilizzato e modificato come desidera l'utente. Quad-SDK è pronto per l'uso, quindi i ricercatori non devono preoccuparsi di implementare gli strumenti e l'infrastruttura; invece, possono mettersi subito a lavorare su comportamenti e applicazioni.
A differenza di altre opzioni, Quad-SDK è compatibile anche con il Robot Operating System (ROS). ROS è un middleware, a metà strada tra hardware e software, che consente a diverse parti di un sistema di dialogare tra loro. Ad esempio, se un robot rileva un ostacolo sul suo cammino e ha bisogno di trasferire informazioni dal suo modulo di percezione al suo modulo decisionale, ROS è ciò che consente quella comunicazione. Immagina un'app che non utilizza iOS o Android:è molto più semplice quando tutto funziona insieme.
La locomozione è un problema a più livelli, in quanto membro del team e dottorato di ricerca. Lo studente Ardalan Tajbakhsh lo descrive:"Per fare qualcosa di significativo su un robot, devi avere molti componenti che lavorano insieme senza problemi". Quad-SDK fornisce un framework per ricercatori e sviluppatori di robotica per concentrare i propri sforzi sugli algoritmi di base anziché sugli strumenti e sull'infrastruttura software.
Altri pacchetti software sono molto bravi a risolvere un componente, come la pianificazione del movimento, ma è fondamentale disporre di framework end-to-end che forniscano gli algoritmi, gli strumenti e l'infrastruttura necessari per eseguire ricerche di robotica di alta qualità.
Quad-SDK è full stack, il che significa che contiene tutti i livelli della gerarchia che influenzano la locomozione quadrupede, a partire dalla pianificazione globale. Uno strato si trova in cima alla pila; Tajbakhsh lo confronta con Google Maps, perché sceglie dove il robot dovrebbe approssimativamente andare per raggiungere la sua destinazione. Il livello successivo, pianificatore locale, è ciò che decide le specifiche del percorso, ad esempio dove il robot deve posizionare i suoi piedi. Ciò culmina in un terzo livello, il driver del robot, che invia comandi alle articolazioni del quadrupede per eseguire il movimento desiderato.
Nelle settimane trascorse da quando Quad-SDK ha vinto un Best Paper Award al Workshop on Legged Robots alla IEEE International Conference on Robotics and Automation (ICRA) 2022, le persone hanno richiesto di utilizzarlo, un indicatore di quanto siano utili le sue soluzioni e di come il formato open source invita alla collaborazione all'interno della comunità della robotica. + Esplora ulteriormente