Un nanorobot a propulsione enzimatica:i nanotubi rivestiti di ureasi si trasformano in un sistema di propulsione in un liquido contenente urea perché l'enzima scompone l'urea in prodotti gassosi. Poiché i tubi hanno sempre piccole asimmetrie, i prodotti della reazione generano una corrente nel fluido che li spinge fuori dal tubo come un getto. Credito:MPI per sistemi intelligenti
I nanorobot e altri mini-veicoli potrebbero un giorno essere in grado di svolgere importanti servizi in medicina, ad esempio conducendo operazioni controllate a distanza o trasportando agenti farmaceutici in una posizione desiderata nel corpo. Però, fino ad oggi è stato difficile guidare con precisione tali micro e nano nuotatori attraverso fluidi biologici come il sangue, liquido sinoviale o l'interno del bulbo oculare. I ricercatori dell'Istituto Max Planck per i sistemi intelligenti di Stoccarda presentano ora due nuovi approcci per la costruzione di sistemi di propulsione per piccoli corpi galleggianti. Nel caso di un motore, la propulsione è generata da bolle che vengono fatte oscillare dagli ultrasuoni. Con l'altro, una corrente causata dal prodotto di una reazione enzimatica spinge un nano nuotatore.
Gli aerei a reazione hanno aperto la strada. bruciano carburante, espellono i prodotti della combustione in una direzione e di conseguenza si muovono nella direzione opposta. I ricercatori dell'Istituto Max Planck per i sistemi intelligenti di Stoccarda lo fanno in modo molto simile, anche se su scala molto più piccola. Il loro nanorobot subacqueo è un nanotubo a parete singola fatto di biossido di silicio, appena 220 nanometri (miliardesimi di metro) di diametro. Una particella di quella natura non sarebbe normalmente in grado di spingersi nei fluidi. Gli scienziati hanno quindi rivestito solo la superficie interna o interna e quella esterna o del nanotubo con l'enzima ureasi che scompone l'urea in ammoniaca e anidride carbonica.
Se un nanotubo così preparato viene introdotto in un fluido contenente urea, questa urea viene scomposta in corrispondenza della parete interna rivestita di ureasi. I prodotti della reazione generano una corrente nel fluido che li spinge fuori dal tubo come un getto. In quanto tale nanonuotatore o è più sottile da un lato che dall'altro o l'urea non è distribuita omogeneamente sulla sua superficie, questo si traduce in una spinta, in modo che il micro-nuotatore sperimenti la propulsione nella direzione opposta, come in un aereo a reazione. I nanogetti hanno raggiunto velocità di 10 micrometri al secondo, cioè quasi quattro centimetri all'ora.
Il motore a reazione più piccolo del mondo
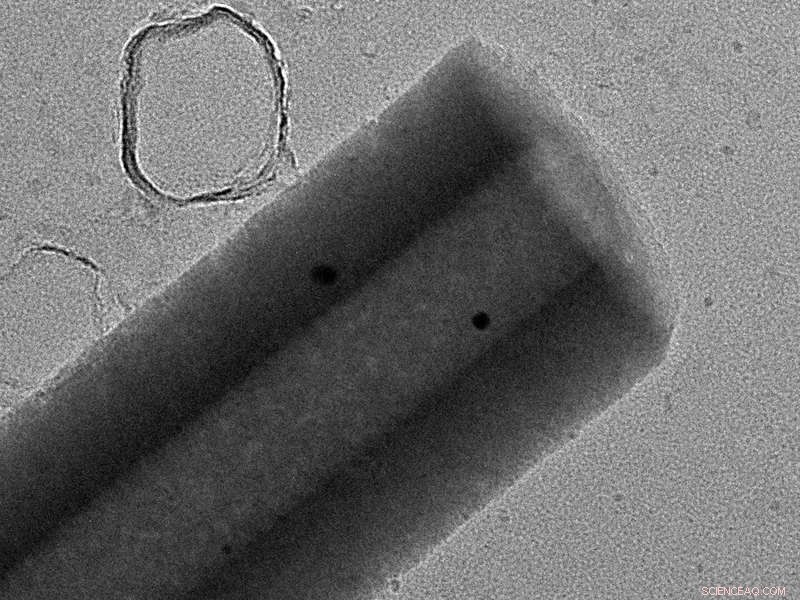
Battere il proprio record:il tubo che Samuel Sanchez e il suo team di ricercatori hanno trasformato in un minuscolo motore a reazione per nanorobot con rivestimento in ureasi ha un'apertura di ca. 220 nanometri – record precedente dei ricercatori, che è ancora nel Guinness dei primati, era circa tre volte più grande. Credito:MPI per sistemi intelligenti
certo, rivestire un nanorobot per ottenere una spinta chimica non è affatto nuovo. Però, il tubo ora presentato, con la sua apertura di 220 nanometri, rappresenta il più piccolo sistema di propulsione a getto finora costruito al mondo. "Il nostro record precedente, che è ancora nel Guinness dei primati, era circa tre volte più grande", spiega Samual Sanchez che guida lo Smart NanoBioDevices Group presso il Max Planck Institute for Intelligent Systems di Stoccarda e allo stesso tempo detiene una cattedra presso l'Istituto di Bioingegneria della Catalogna a Barcellona.
E c'è un altro nuovo aspetto del nanojet che anche gli scienziati dell'Harbin Institute of Technology di Shenzhen in Cina hanno contribuito a sviluppare:per la prima volta, tutti i materiali ei partner di reazione utilizzati sono completamente biocompatibili. "Le precedenti unità chimiche di questo tipo erano generalmente basate su un catalizzatore metallico sulla cui superficie il perossido di idrogeno veniva scomposto in molecole di idrogeno e ossigeno", dice Sanchez. Durante il processo si creano bolle di ossigeno, che crea una spinta nella direzione opposta. Sia il perossido di idrogeno che le bolle di gas avrebbero degli svantaggi se usati nel corpo umano. Ma questo non è il caso della versione rivestita di ureasi con i suoi prodotti di reazione solubili in acqua e quindi privi di bolle. "Ureasi si verifica comunque nell'organismo umano", Sanchez spiega.
I ricercatori ora vogliono testare la biocompatibilità in modo più preciso e nel processo esaminare se possono riuscire a impiantare tali microtubi nelle singole cellule. "Sarebbe necessario, Certo, per portare le molecole di farmaco a destinazione, Per esempio", dice Sanchez.
Le bolle oscillanti forniscono spinta
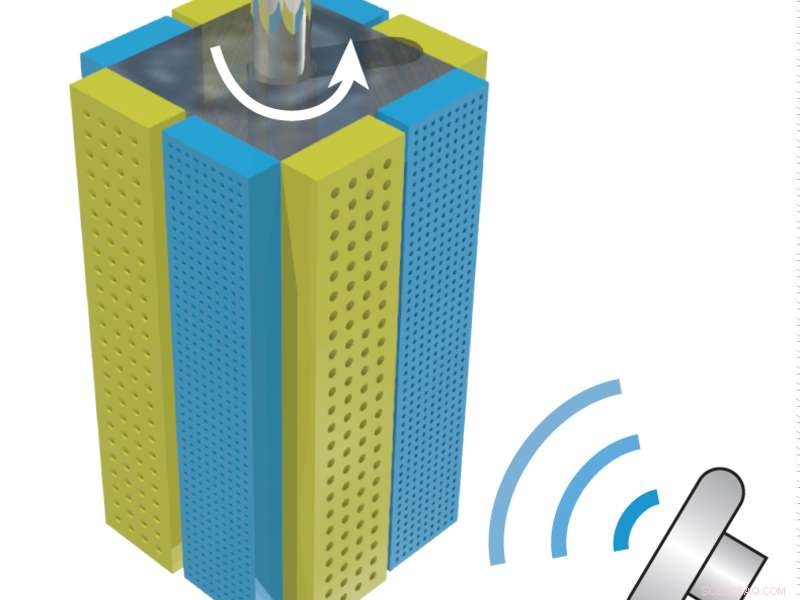
Motore ad ultrasuoni per minirobot:il motore cuboide sviluppato da Peer Fischer e dal suo team di ricercatori è dotato di camere per bolle di due diverse dimensioni (gialla e blu). Le bolle di una dimensione si trovano su metà della faccia cuboide divisa longitudinalmente. Gli ultrasuoni fanno oscillare le bolle. Le bolle di diverse dimensioni producono spinte diversamente forti, in modo che il parallelepipedo ruoti sul proprio asse. Credito:Tian Qiu/MPI per sistemi intelligenti
Mentre le bolle di gas erano ancora indesiderate nell'approccio specificato, costituiscono il fulcro di un principio di propulsione completamente nuovo per i minirobo, quali colleghi dell'Istituto nel Micro, Propongono Nano e Molecular Systems Group guidato da Peer Fischer. Però, qui le bolle di gas non gorgogliano liberamente attraverso il fluido e quindi non possono danneggiare l'organismo. Piuttosto, i ricercatori racchiudono le microbolle in piccole camere cilindriche lungo una striscia di plastica. Per fornire l'unità, perciò, le bolle di gas si espandono e si contraggono ciclicamente perché gli ultrasuoni le fanno oscillare. Poiché le bolle pulsanti sono in camere aperte su un lato, si espandono solo attraverso questa apertura. Nel processo, esercitano una forza sulla parete opposta della camera che spinge la striscia di plastica. Per ottenere una propulsione degna di nota, i ricercatori hanno disposto diverse camere con bolle d'aria in parallelo sulla loro striscia polimerica.
Un aspetto notevole:la frequenza dell'onda sonora necessaria per farli oscillare dipende dalla dimensione delle minuscole bolle. Più grandi sono le bolle, minore è la frequenza di risonanza corrispondente. I ricercatori hanno usato questa connessione per far ruotare il loro nuotatore alternativamente in senso orario e antiorario. Fare così, hanno messo bolle di diverse dimensioni sulle due metà dei quattro, lunghe facce parallele divise longitudinalmente. Due diverse frequenze sonore sono state quindi utilizzate in un liquido per far oscillare tutte le bolle di una dimensione. In questo modo, gli scienziati hanno generato spinte esclusivamente su metà della faccia cuboide che lo hanno fatto ruotare sul proprio asse. Questo piccolo motore di rotazione ad azionamento acustico con aree longitudinali di cinque millimetri quadrati ha raggiunto nel processo fino a mille rotazioni al minuto.
Una possibilità per guidare i mini nuotatori
"La variazione delle dimensioni delle bolle consente quindi a un mini-nuotatore di guidare deliberatamente in direzioni diverse", dice Tian Qiu, che conduce anche ricerche presso l'Istituto Max Planck di Stoccarda e ha svolto un ruolo apprezzabile nello studio. Secondo Qiu, un ulteriore vantaggio del nuovo principio di propulsione è che anche i nuotatori con una struttura geometrica complicata possono essere rivestiti con le strisce sottilissime insieme alle camere per le bolle. Continua spiegando che l'uso degli ultrasuoni è adatto anche a mezzi otticamente impenetrabili come il sangue. onde luminose, che sono anche un potenziale strumento di controllo per micro-drive, non può ottenere nulla in questo caso. I ricercatori ora vogliono utilizzare i test in mezzi biologici reali per verificare se il nuovo principio di azionamento è anche in grado di sfruttare al meglio i suoi vantaggi nella pratica.