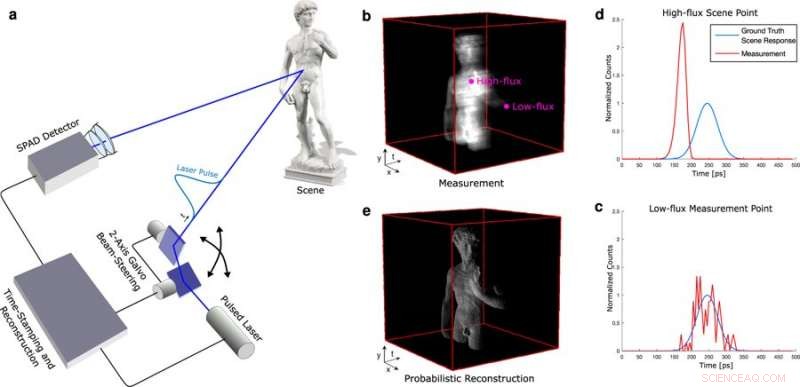
Framework di imaging 3D al di sotto del picosecondo. (a) Un collimato, il laser pulsato illumina la scena in un unico punto. Il laser viene scansionato lateralmente utilizzando un galvanometro a specchio a 2 assi. L'elettronica di temporizzazione e di controllo contrassegna l'ora di ciascun fotone rilevato in arrivo rispetto all'ultimo impulso emesso e accumula questi eventi in un istogramma dei conteggi spazio-temporali dei fotoni (b). Questo istogramma viene elaborato per stimare sia la riflettività che le informazioni sulla profondità (c). Si evidenziano due punti, uno corrispondente alle misurazioni ad alto flusso (d) e l'altro alle misurazioni a basso flusso (e). Mentre questi ultimi sono rumorosi, misurazioni ad alto flusso soffrono di distorsione pile-up che introducono una distorsione significativa per la stima della profondità degli algoritmi convenzionali. Il metodo di stima proposto modella accuratamente entrambi questi scenari, consentendo di stimare le informazioni di riflettanza e il tempo di viaggio con una precisione inferiore al picosecondo da misurazioni gravemente distorte. Credito: Rapporti scientifici , Doi:10.1038/s41598-018-35212-x
I diodi a valanga a fotone singolo (SPAD) sono promettenti tecnologie di rilevamento che possono essere utilizzate per ottenere sistemi di imaging 3D attivi con acquisizione rapida, elevata precisione di temporizzazione ed elevata sensibilità di rilevamento. Tali sistemi hanno ampie applicazioni nei domini dell'imaging biologico, telerilevamento e robotica. Però, i rilevatori devono affrontare problemi tecnici noti come pile-up che causano distorsioni di misurazione che ne limitano la precisione. In un recente studio, condotto presso il Dipartimento di Ingegneria Elettrica della Stanford University, gli scienziati Felix Heide e collaboratori hanno sviluppato un modello probabilistico di formazione dell'immagine in grado di modellare accuratamente il pile-up. Utilizzando il modello proposto, gli scienziati hanno ideato metodi inversi per stimare in modo efficiente e affidabile la profondità della scena e la riflettanza dai conteggi dei fotoni registrati. Con l'algoritmo sono stati in grado di dimostrare miglioramenti nell'accuratezza dei tempi, rispetto alle tecniche esistenti. Ma ancora più importante, il modello ha consentito la precisione al sub-picosecondo nell'imaging 3D fotone efficiente per la prima volta in scenari pratici, mentre in precedenza si osservavano solo conteggi di fotoni ampiamente variabili. I risultati sono ora pubblicati in Rapporti scientifici .
L'imaging attivo ha ampie applicazioni in tutte le discipline che vanno dalla guida autonoma all'imaging microscopico di campioni biologici. I requisiti chiave per queste applicazioni includono un'elevata precisione con i tempi, tassi di acquisizione veloci, gamme operative dinamiche ed elevata sensibilità di rilevamento di oggetti immagine nascosti alla vista di una telecamera. Il telerilevamento e le applicazioni automatizzate richiedono intervalli di acquisizione da <1 metro alla scala dei chilometri.
L'imaging non in linea di vista si basa sull'ottenimento di informazioni codificate tramite i pochi fotoni di ritorno della luce indiretta a diffusione multipla, oltre alla luce riflessa direttamente. Per abilitare queste applicazioni, sono stati sviluppati rivelatori ultrasensibili per registrare singoli fotoni di ritorno da una sorgente di illuminazione pulsata. I diodi a valanga a fotone singolo (SPAD) sono una delle tecnologie di rilevamento risolte nel tempo più sensibili che possono essere prodotte utilizzando il processo di fabbricazione complementare di metallo-ossido-semiconduttore (CMOS). Gli SPAD si sono rapidamente affermati come tecnologia di rilevamento fondamentale per l'imaging 3D.
Nel suo principio di funzione, Gli SPAD sono fotodiodi a polarizzazione inversa che operano in modalità Geiger, cioè al di sopra della loro tensione di rottura. Quando i fotoni sono incidenti sulla superficie attiva di uno SPAD, una valanga di elettroni orodatata può essere innescata. La marcatura temporale ripetuta dei fotoni che ritornano da una sorgente di illuminazione a impulsi sincroni che tipicamente opera a frequenze MHz può accumulare un istogramma di conteggi di fotoni nel tempo. L'istogramma risultante documenta l'intensità approssimativa dell'impulso luminoso di ritorno per recuperare e caratterizzare la distanza, riflettanza e geometria 3D di un oggetto nascosto alla vista.
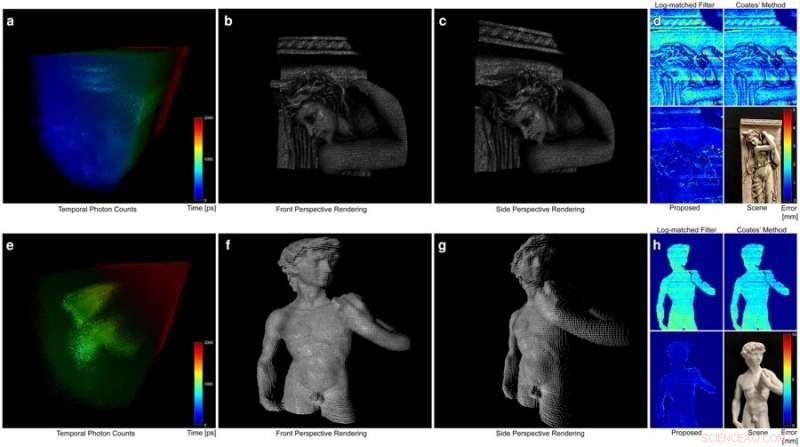
Ricostruzioni sperimentali. Una distribuzione spazio-temporale registrata del numero di fotoni. (un, e) viene elaborato per stimare una nuvola di punti 3D (b, C, F, g) che contenga informazioni sia sulla profondità che sull'albedo, qui mostrato per due diverse scene (fotografie mostrate in (d, h)). Le mappe degli errori codificate per colore (d, h) confrontare direttamente i risultati di diverse tecniche di stima della profondità, compreso il filtraggio log-matched, Metodo di Coates seguito da adattamento gaussiano (su misura ad alto flusso), e il metodo proposto. Credito: Rapporti scientifici , Doi:10.1038/s41598-018-35212-x
A seconda dell'applicazione prevista, Gli SPAD possono funzionare in modalità free running (che consente di rilevare simultaneamente tutti gli eventi di fotoni a tutti i tempi di arrivo) o in modalità gated (in cui vengono rilevati solo i fotoni in una specifica finestra temporale tra gli impulsi). Tutte le applicazioni sono soggette a un fenomeno fondamentale noto come distorsione pile-up che limita fortemente la precisione. Pileup può intrinsecamente limitare il principio di funzionamento del rilevatore SPAD. Per esempio, dopo ogni valanga di elettroni innescata, il rivelatore richiede l'estinzione prima di rilevare ulteriori eventi di arrivo di fotoni. Durante questo "tempo morto" (da dieci a centinaia di nanosecondi), il rilevatore è inattivo. Ciò può provocare i fotoni precedenti di un singolo impulso laser che innescano una valanga, mentre gli impulsi successivi sono probabilmente ignorati nel tempo morto; creando misurazioni distorte imprecise note come pile-up. Il fenomeno può essere evitato operando sistemi di imaging attivo in un regime a basso flusso, come si è visto con le tecniche all'avanguardia utilizzate in precedenza per l'imaging del primo fotone.
Però, le condizioni variano per le applicazioni di imaging 3D in robotica, imaging biologico o rilevamento automobilistico poiché operano in ambienti in cui gli oggetti che riflettono un numero elevato e basso di fotoni sono essenziali per il processo decisionale. La grande variazione nel numero di fotoni acquisiti che risulta da diverse profondità o dalla diversa riflettività di oggetti diversi è cruciale per l'imaging 3D. In questo lavoro, Heide et al. ha introdotto un nuovo algoritmo di stima che ha superato i limiti esistenti dei sistemi di imaging 3D attivi utilizzando SPAD a esecuzione libera.
Il metodo proposto ha migliorato l'accuratezza della stima esistente della profondità e dell'albedo, in un'ampia gamma di misurazioni a basso flusso e ad alto flusso. Gli scienziati hanno introdotto un modello probabilistico di formazione dell'immagine che includeva pile-up, con efficienti metodi inversi derivati per la stima della profondità e dell'albedo. Il framework di ricostruzione ha stimato congiuntamente tutti i parametri sconosciuti per superare i limiti algoritmici che in precedenza limitavano la precisione temporale. Il metodo proposto ha consentito l'imaging 3D altamente accurato e veloce di aprire nuovi regimi operativi di imaging 3D fotoni-efficiente applicabile in condizioni con conteggi di fotoni notevolmente variabili.
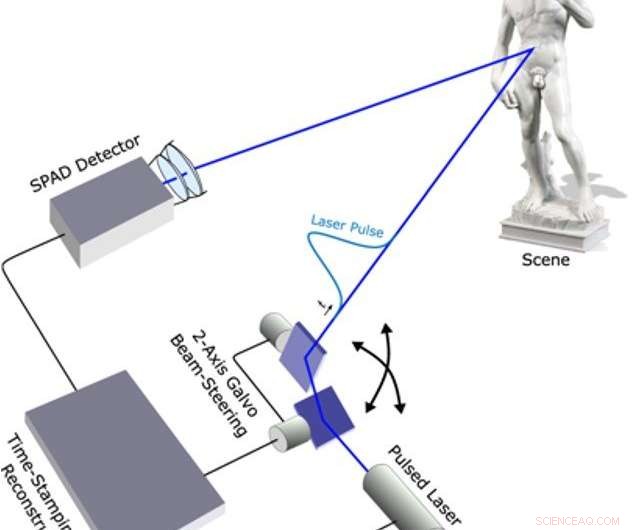
Hardware sperimentale per l'imaging 3D. L'illustrazione schematica mostra la scena della "Statua di David", fonte di illuminazione e la procedura di marcatura temporale per la ricostruzione dell'immagine. Credito: Rapporti scientifici , Doi:10.1038/s41598-018-35212-x
Le prestazioni del metodo proposto sono state valutate su due scene con riflettanza e profili di profondità molto variabili, che includeva la statua del David e una scena in bassorilievo. Entrambe le istanze contenevano oggetti con geometrie complesse e proprietà di riflettanza variabili, incluso il comportamento speculare per la "Statua di David" e la riflettanza lambertiana con albedo spazialmente variabile nella scena del "Bassorilievo". Per entrambe le scene gli scienziati hanno catturato una misurazione di riferimento della verità al suolo (informazioni fornito da evidenze empiriche) con filtro a densità neutra al 5%, che ha eliminato le distorsioni accumulate smorzando l'intensità della sorgente.
L'hardware del sistema conteneva un sensore a risoluzione temporale, laser pulsato, illuminazione e ottica di raccolta. La configurazione prevedeva anche una serie di specchi di scansione per ottenere un modello di illuminazione a scansione raster. La tempistica degli arrivi dei fotoni è stata acquisita con un modulo di conteggio a singolo fotone correlato al tempo PicoHarp 300. La sorgente di illuminazione era un laser a picosecondi da 450 nm o 670 nm (che generava l'intera larghezza a metà del FWHM massimo, larghezze di impulso di 90 ps e 50 ps). L'ottica di raccolta consisteva in un obiettivo di 75 m, Obiettivo relè da 30 mm e obiettivo per microscopio, progettato per estendere il campo visivo dello SPAD attraverso l'area scansionata dalla fonte di illuminazione.
Le misurazioni sperimentali sono servite come input per il metodo proposto e sono state acquisite senza filtri nel percorso ottico. Durante lo studio sono state ottenute ricostruzioni della profondità e dell'albedo insieme alle corrispondenti mappe di errore. I risultati hanno verificato che il metodo proposto ha ottenuto ricostruzioni di alta qualità non influenzate da pile-up o rumore di sparo dipendenti dalla scena (rumore elettronico associato alla natura particellare della luce). I risultati sono stati confrontati con metodi convenzionali, come la stima del filtro log-matched e il metodo di correzione del pileup di Coates che non sopprimeva efficacemente il pileup e soffriva della precisione della profondità dipendente dalla scena. In contrasto, il metodo introdotto da Heide et al. ha raggiunto una precisione inferiore al picosecondo.
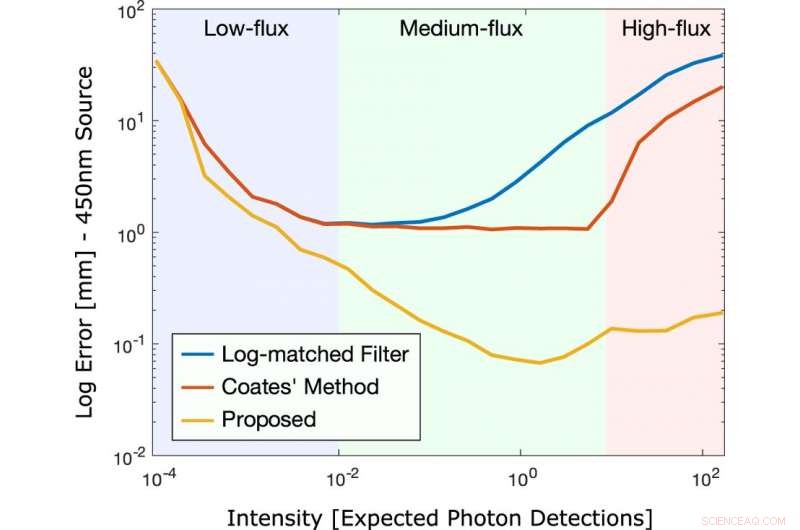
Regime di conteggio ottimale dei fotoni. Precisione di ricostruzione della profondità per diversi conteggi di fotoni per il laser Alphalas LD-450-50 da 450 nm (FWHM di 90 ps). Il filtro log-matched convenzionale, metodo di Coates, e il metodo proposto vengono confrontati. Il numero ottimale di conteggi di fotoni giaceva intorno alla regione non convenzionale di 1 fotone rilevato in media per impulso, indipendente dalla risposta all'impulso e per un'ampia gamma di larghezze dei contenitori di istogrammi. Credito: Rapporti scientifici , Doi:10.1038/s41598-018-35212-x
Il codice e i dati utilizzati da Heide et al. per generare i risultati dello studio sarà disponibile su GitHub. In totale, il modello probabilistico di formazione dell'immagine proposto e i corrispondenti metodi inversi hanno raggiunto una precisione inferiore al picosecondo per l'imaging 3D attivo, nonostante le larghezze di impulso laser siano maggiori di 50 ps. Il nuovo metodo ha raggiunto un'elevata precisione in un intervallo dinamico da misurazioni a basso flusso a misurazioni ad alto flusso rispetto alle tecniche tradizionali. Nel futuro, il metodo proposto può facilitare l'acquisizione a lungo raggio multiplexando più risposte colpite da pile-up. L'innovazione proposta apre la strada a sistemi di imaging 3D fotoni efficienti veloci e precisi, dove nella pratica si osservano conteggi di fotoni molto variabili. Le applicazioni possono spaziare in vaste discipline per includere la mappatura e la navigazione 3D, ricostruzione e conservazione dell'arte, guida autonoma, visione per robot e macchine, informazioni geografiche, imaging industriale e microscopico.
© 2018 Science X Network