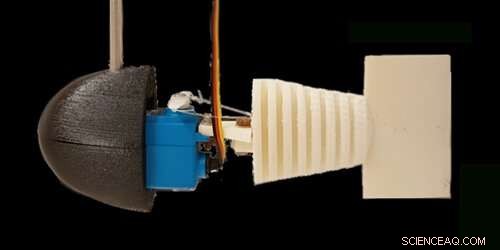
La semplice unità robotica dei ricercatori. Il materiale bianco è stampato in 3D utilizzando polimeri deformabili. Un servomotore (blu) aziona due cavi che provvede alla deformazione del robot. La parte scura è stampata in 3D in un materiale solido. Credito:Sanchez-Rodriguez et al.
Negli ultimi decenni, i robotisti hanno sviluppato una varietà di robot ispirati alla natura, umani e animali. Per imitare efficacemente animali o umani, però, questi robot non dovrebbero solo assomigliare a loro; dovrebbero anche muoversi in modi simili.
I ricercatori dell'Université Côte d'Azur-CNRS hanno recentemente introdotto un nuovo meccanismo bioispirato per ottenere il nuoto simile a quello dei pesci nei robot. Questo meccanismo, introdotto in un articolo pubblicato in Lettere di revisione fisica , si basa sulla cosiddetta propriocezione, la capacità degli animali di raccogliere informazioni sulla posizione del proprio corpo, moto e accelerazione.
"Con i miei colleghi M. Gazzola e L. Mahadevan, abbiamo scoperto una legge generale che prevede la velocità dei nuotatori subacquei macroscopici in funzione dell'andatura del nuoto, cioè., l'ampiezza e la frequenza della corsa pinna/coda, "Medico Argentina, uno dei ricercatori che ha condotto lo studio, detto Phys.org . "Il nostro lavoro ha fornito una spiegazione razionale di questa legge di scala che ha funzionato su nuotatori di pochi centimetri di lunghezza fino agli animali più grandi, come le balene blu (30 m)."
Per testare il loro modello, i ricercatori volevano raccogliere i dati cinematici dell'ondulazione della coda, che non è stato ancora misurato negli animali vivi. Inoltre, erano curiosi di capire quali meccanismi permettessero a un dato nuotatore di selezionare l'ampiezza e la frequenza del movimento della sua coda. Per realizzare questo, hanno costruito un piccolo robot cedevole con un corpo che può deformarsi biomimeticamente.
"Questa piattaforma robotica ci ha permesso di convalidare la nostra legge di scala, ma anche per esplorare scenari per la selezione della cinematica ondulatoria, "Ha detto l'Argentina. "Sembrava naturale che la propriocezione dovesse essere un ottimo candidato, poiché è un senso (a volte chiamato sesto senso) che valuta la deformazione del corpo, la sua accelerazione o la forza percepita. Nel nostro recente articolo, ci siamo chiesti se un circuito di feedback controllato dalla propriocezione potesse innescare la locomozione e il nostro lavoro ha dimostrato che in effetti i sensori propriocettivi possono indurre un nuoto piacevole e costante".
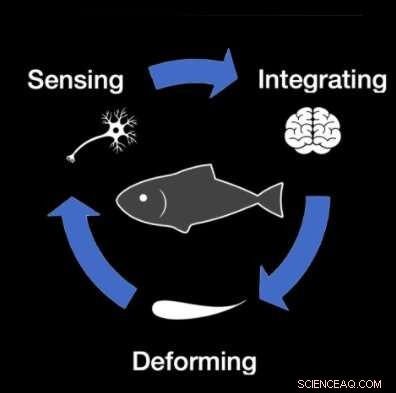
Credito:Sanchez-Rodriguez et al.
Il vantaggio principale del meccanismo propriocettivo introdotto dall'Argentina e dai suoi colleghi è che consente ai nuotatori robotici di adattare la loro ondulazione all'ambiente circostante, proprio come fanno molti pesci. Infatti, la maggior parte dei pesci ha linee laterali che possono misurare la pressione del fluido sul loro corpo, permettendo loro di integrare i sensi propriocettivi.
"La nostra idea era di sfruttare il feedback della forza percepita del robot alla deformazione della coda, " Ha detto l'Argentina. "Questo approccio è quindi semplice, robusto e potrebbe spiegare la scelta delle andature per il nuoto."
I ricercatori hanno testato il meccanismo propriocettivo che hanno sviluppato su un vero robot biomimetico, confrontando le sue prestazioni con quelle ottenute utilizzando un modello generico per il nuoto robotico. I loro risultati sono stati molto promettenti, poiché il loro meccanismo si confrontava favorevolmente con il modello generico e consentiva di nuotare come un pesce nel robot.
"La propriocezione può anche essere il primo passo per creare robot ondulati che adattano automaticamente la loro cinematica all'ambiente, L'Argentina ha detto. "Il nostro lavoro ha dimostrato che questo semplice accoppiamento della propriocezione al movimento della coda potrebbe innescare un'instabilità che fa ondeggiare la coda e spinge il nuotatore".
Nel futuro, il meccanismo propriocettivo ideato da questo team di ricercatori potrebbe consentire lo sviluppo di robot acquatici in grado di muoversi in modo più efficace nell'acqua. Nel frattempo, L'Argentina e i suoi colleghi continueranno a lavorare sul loro robot per migliorarne le capacità.
"Attualmente stiamo insegnando al robot a nuotare utilizzando tecniche di apprendimento automatico, " Ha detto l'Argentina. "I nostri primi risultati ci danno molta fiducia che dovremmo essere in grado di costruire / progettare robot ondulati che nuotano usando l'intelligenza artificiale".
© 2021 Science X Network