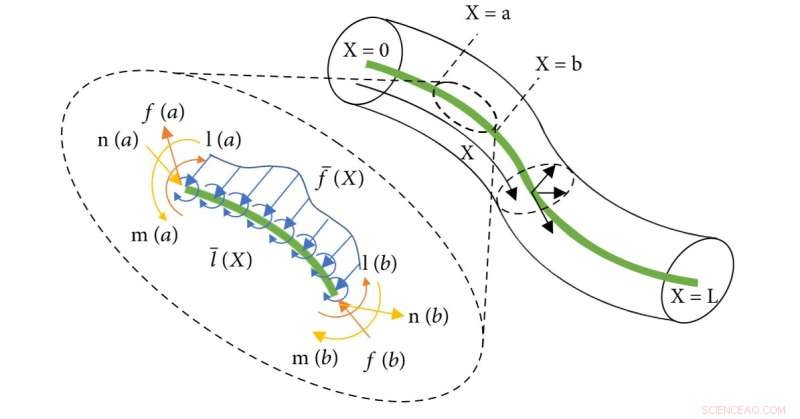
Diagramma dell'analisi della forza di mezzi continui. Credito:Cyborg e sistemi bionici (2022). DOI:10.34133/2022/9783517
Un documento di revisione degli scienziati dell'Università di Zhejiang ha riassunto lo sviluppo di robot continui dagli aspetti di progettazione, attuazione, modellazione e controllo. Il nuovo articolo di revisione, pubblicato il 26 luglio sulla rivista Cyborg and Bionic Systems , ha fornito una panoramica delle tecnologie classiche e avanzate dei robot continui, insieme ad alcune prospettive urgenti da risolvere.
"Alcuni robot continui su piccola scala con nuovi metodi di attuazione sono ampiamente studiati nel campo del trattamento chirurgico interventistico o dell'endoscopia, tuttavia, la caratterizzazione delle loro proprietà meccaniche è ancora un problema diverso", ha spiegato l'autore dello studio Haojian Lu, professore presso il Università di Zhejiang.
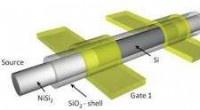
Per realizzare la miniaturizzazione dei robot continui, molti materiali all'avanguardia sono stati sviluppati e utilizzati per realizzare l'attuazione dei robot, mostrando vantaggi unici. I robot continui incorporati con micromagnete o realizzati in materiale composito ferromagnetico hanno un'accurata capacità di guida in un campo magnetico esterno controllabile; I robot continui magneticamente morbidi, invece, possono raggiungere piccoli diametri, fino alla scala del micron, che garantisce la loro capacità di condurre una terapia mirata nei bronchi o nei vasi cerebrali.
Tuttavia, è difficile per i robot continui magneticamente morbidi mantenere la stabilità sotto le forze esterne e le minuscole punte dei magneti rigidi rischiano di cadere all'interno del corpo durante il funzionamento. Per ottenere un controllo più sicuro e affidabile, vengono utilizzati materiali a memoria di forma per azionare il robot continuo e per l'esame cardiovascolare e la somministrazione nasofaringea. Il vantaggio principale di questo materiale autodeformante è che fornisce estensione, flessione e torsione per lo stelo principale e può ottenere l'attuazione complessiva mantenendo una scala ridotta, ma la sua isteresi intrinseca rende difficile ottenere una risposta rapida e un posizionamento preciso al allo stesso tempo, e ha una bassa capacità di carico e un cablaggio della tubazione piuttosto complesso.
Considerando le deformazioni non lineari causate dall'attuazione, l'elasticità del materiale e la sensibilità al contatto con l'ambiente, i robot continui devono affrontare grandi sfide nella modellazione analitica precisa.
Una delle principali sfide nella modellazione è semplificare i modelli e compromettere la relazione tra complessità di calcolo e accuratezza del modello.
Allo stesso modo, il problema del controllo è anche una grande sfida per il robot continuo. La sfida è trovare il valore di attuazione appropriato per raggiungere lo stato desiderato per eseguire un determinato compito. Il controllo basato sul modello dipende fortemente dalla modellazione precisa del robot continuo e dall'accuratezza della percezione dei sensori. Inoltre, il funzionamento remoto viene spesso utilizzato per controllare il robot continuo in campo medico.
"Il campo di ricerca dei robot continui ha fatto grandi progressi, ma ci sono ancora alcuni problemi da risolvere tra cui la miniaturizzazione, la percezione più potente e il motore di simulazione stabile", ha affermato Lu. + Esplora ulteriormente