Un gruppo di ricerca della Cornell University ha sviluppato un nuovo modo di progettare complesse macchine su microscala, che trae ispirazione dal funzionamento delle proteine e dal becco dei colibrì.
L'articolo del gruppo, "Bifurcation Instructed Design of Multistate Machines", pubblicato in Proceedings of the National Academy of Sciences . L'autore principale è Itay Griniasty, un ricercatore post-dottorato Schmidt AI nel laboratorio di Itai Cohen, professore di fisica al College of Arts and Sciences.
Costruire macchine sempre più piccole non è semplicemente una questione di rimpicciolire i componenti. Mentre le macchine macroscopiche sono tipicamente progettate per essere compartimentalizzate, dividendo un compito in piccole parti e assegnando ciascuna a un pezzo diverso della macchina, le proteine – le macchine microscopiche per eccellenza responsabili di gran parte della biologia – hanno un design diverso. I compiti vengono spesso raggiunti attraverso il movimento coordinato di tutti i componenti della proteina, rendendoli più resistenti al caos del mondo microscopico.
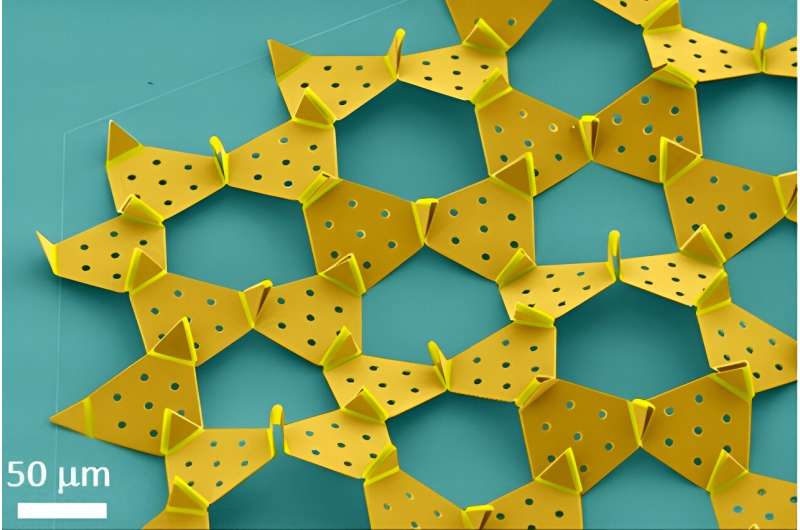
In precedenza, il gruppo di Cohen ha utilizzato i principi degli origami per fabbricare una serie di dispositivi su microscala, dalle strutture auto-pieghevoli ai microrobot ambulanti, innovativi per le loro dimensioni ma relativamente basilari nella funzione. Aggiungere funzionalità ai fogli origami si rivela un compito impegnativo.
"Le macchine che abbiamo realizzato finora sono molto, molto semplici. Ma quando abbiamo iniziato a pensare a come aumentare la funzionalità in sistemi altamente accoppiati, abbiamo iniziato a renderci conto che ogni volta che si sposta una parte della macchina, tutte le altre parti si muovono", ha detto Cohen. "È esasperante, perché non puoi isolare nulla, è tutto collegato in questi fogli. Poi abbiamo iniziato a chiederci come si fa a farlo nel mondo microscopico."
Una proteina, hanno detto, potrebbe essere pensata come una macchina che salta da uno stato all’altro in risposta a piccoli cambiamenti di alcuni parametri. I ricercatori si sono ispirati a un esempio di questo tipo di funzionalità su macroscala:il colibrì.
Uno studio del 2010 di Andy Ruina, professore di ingegneria meccanica John F. Carr, ha mostrato come il becco di un colibrì può essere "aperto e poi richiuso senza problemi attraverso un'appropriata sequenza di azioni di flessione e torsione da parte dei muscoli della mascella inferiore". /P>
Questo sistema si spiega con un concetto matematico chiamato biforcazione della cuspide, in cui, a seconda delle forze esercitate dai muscoli della mascella, il becco può avere un unico stato stabile, cioè chiuso, o due stati stabili, sia aperto che chiuso. Il punto in cui l'unico stato stabile si divide in due stati stabili è la biforcazione della cuspide.
Il vantaggio di operare attorno a una biforcazione della cuspide è che fornisce un paio di caratteristiche progettuali chiave. Il primo è la protezione topologica, che garantisce coerenza nelle prestazioni di un dispositivo, in modo che se i muscoli della mascella tirano in modo leggermente diverso, il becco può ancora aprirsi e chiudersi di scatto. Il secondo è un vantaggio di leva, che garantisce che i muscoli debbano muoversi solo un po' per attivare un grande cambiamento nel becco. Questi sono esattamente i componenti necessari per ottenere la funzione su microscala.
Cohen, Griniasty e i loro collaboratori si chiedevano se potevano aumentare il numero di stati organizzati attorno a una biforcazione da due – cioè aperti e chiusi – a dozzine o forse centinaia. Questa estensione consentirebbe la progettazione di macchine che eseguono funzioni complesse.
"Invece di combinare funzioni compartimentate, queste capacità emergerebbero dall'intero oggetto", ha detto Griniasty. "È ballare insieme."
I ricercatori hanno reclutato Teaya Yang '22 e Yuchao Chen '19, entrambi coautori, per creare un modello magnetoelastico su macroscala dimostrativo con una biforcazione a farfalla che consentisse al sistema di scattare o di passare dolcemente tra tre stati stabili. Il modello era costituito da due pannelli, uno dei quali si muoveva su un piano mentre l'altro era libero di ruotare attorno ad un cardine fisso. Ogni pannello era decorato con nove magneti che interagivano tra loro, creando interazioni complesse che ricordavano quelle presenti nelle proteine.
Una sfida centrale, tuttavia, è stata trovare un metodo per progettare modelli magnetici che stimolassero la biforcazione desiderata. Griniasty e David Hathcock, Ph.D. '22 superò il problema sviluppando un algoritmo basato sul lavoro sui sistemi dinamici di John Guckenheimer, l'A.R. Bullis Professore Emerito di Matematica (A&S).
"Se provassimo semplicemente a indovinare questi modelli magnetici, per generare equilibri multipli, esauriremmo la potenza di calcolo", ha detto Cohen. "Così Itay ha progettato un algoritmo molto carino che semplifica la ricerca."
Il prossimo passo sarà dimostrare il concetto su microscala.
"Per una macchina da 100 micron, come i tipici robot che produciamo, Itay ha calcolato che potremmo raggiungere 20 stati separati", ha detto Cohen. "Questo è più o meno ciò che immaginiamo possa essere realizzato su scala microscopica, una macchina in cui utilizzo un attuatore per spostare uno dei pannelli e la configurazione dell'intera macchina potrebbe passare tra 20 diverse configurazioni. Potresti avere una macchina che potrebbe, diciamo, muoversi attraverso un fluido o magari eseguire un'azione complicata di presa."
Ulteriori informazioni: Teaya Yang et al, Progettazione guidata da Bifurcation di macchine multistato, Atti dell'Accademia nazionale delle scienze (2023). DOI:10.1073/pnas.2300081120
Informazioni sul giornale: Atti dell'Accademia Nazionale delle Scienze
Fornito dalla Cornell University