La pinza può anche oggetti porosi, come questa roccia. Credito:JPL
Un team di ricercatori della California ha sviluppato una pinza robotica che combina le proprietà adesive delle dita dei gechi e l'adattabilità dei robot morbidi ad aria per afferrare una varietà di oggetti molto più ampia rispetto allo stato dell'arte.
I ricercatori presenteranno i loro risultati alla Conferenza internazionale 2018 sulla robotica e l'automazione dal 21 al 25 maggio a Brisbane, Australia. La pinza può sollevare fino a 45 libbre. e potrebbe essere utilizzato per afferrare oggetti in una vasta gamma di impostazioni, dalle fabbriche alla Stazione Spaziale Internazionale.
I gechi sono conosciuti come i migliori scalatori della natura a causa di un sofisticato meccanismo di presa sulle dita dei piedi. Nei lavori precedenti, i ricercatori della Stanford University e del Jet Propulsion Laboratory hanno ricreato quel meccanismo con un materiale sintetico chiamato adesivo ispirato al geco. Questo materiale è stato utilizzato principalmente su superfici piane come le pareti. Nel lavoro attuale, i ricercatori hanno unito le forze con gli ingegneri dell'Università della California a San Diego. Il team ha ricoperto le dita di una morbida pinza robotica con l'adesivo del geco, permettendogli di ottenere una presa più salda su una vasta gamma di oggetti, comprese pipe e tazze, pur essendo in grado di maneggiare oggetti ruvidi come le rocce. La pinza può anche afferrare oggetti in varie posizioni, per esempio afferrando una tazza da molte angolazioni diverse.
I ricercatori hanno dimostrato che la pinza può afferrare e manipolare ruvide, oggetti porosi e sporchi, come le rocce vulcaniche, un compito tipicamente impegnativo per gli adesivi dei gechi. Era anche in grado di raccogliere pezzi di grandi dimensioni, tubo cilindrico:un compito tipicamente difficile per le pinze robotiche morbide.
"Ci siamo resi conto che queste due componenti, robotica morbida e adesivi geco, si completano a vicenda molto bene, " ha detto Paul Glick, il primo autore del documento e un dottorato di ricerca. studente nel laboratorio di robotica e design bioispirato presso la Jacobs School of Engineering dell'UC San Diego.
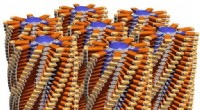
Il geco è uno dei migliori scalatori della natura, grazie a milioni di peli microscopici, con caratteristiche da 20 a 30 volte più piccole di un capello umano, che gli consentono di arrampicarsi praticamente su qualsiasi superficie. I peli terminano in minuscole nanostrutture che interagiscono a livello atomico con le molecole sulla superficie che il geco sta cercando di afferrare. Questa interazione, alimentato da quelle che vengono chiamate forze di van der Waals, fa sì che le dita dei piedi del geco si attacchino e si staccano facilmente secondo necessità. I ricercatori del JPL utilizzano materiali sintetici e serie simili di caratteristiche microscopiche per sfruttare la potenza delle forze di van der Waals e hanno mostrato che questi adesivi conservavano molte delle stesse proprietà delle dita degli animali che li hanno ispirati.
Poiché gli adesivi geco sono alimentati da interazioni molecolari tra le superfici, funzionano meglio quando hanno un'ampia superficie di contatto. Rivestire l'interno delle morbide dita robotiche con questi adesivi massimizza la quantità di superficie con cui entrano in contatto, garantendo una presa migliore.
Il team di ingegneri risolve due diversi problemi in questo documento.

I ricercatori hanno montato una versione leggermente modificata della pinza su un braccio robotico al JPL. Hanno dimostrato che è in grado di sollevare fino a 45 libbre. Credito:JPL
Primo, i ricercatori della UC San Diego si sono assicurati che le dita della pinza mantenessero un contatto costante con la superficie di qualsiasi oggetto. Un problema comune con le dita morbide ad aria è che tendono a gonfiarsi al centro quando vengono gonfiate, riducendo questo contatto superficiale.
Glick ha trovato uno studio degli anni '70 che ha fornito le equazioni necessarie per risolvere il problema nel processo di progettazione. Ciò ha permesso ai ricercatori di fare in modo che la pinza applicasse le forze corrette lungo l'intera lunghezza delle dita.
In secondo luogo, i ricercatori si sono concentrati sulla distribuzione delle forze su superfici che non sono piatte per ottimizzare le prestazioni degli adesivi ispirati ai gechi. I ricercatori hanno trovato un modo per distribuire la forza lungo un morbido, pinza flessibile, mantenendo la precisione di fabbricazione richiesta per gli adesivi.
Il team ha fatto questo utilizzando un tessuto ad alta resistenza incorporato nel dito che può facilmente piegarsi ma resiste allo stiramento per supportare carichi più grandi. Le dita sono fissate rigidamente a una base, che impedisce al silicone facilmente estensibile di deformarsi oltre quanto necessario. Questa combinazione di materiali morbidi e rigidi consente alla pinza di adattarsi a molti oggetti resistendo a grandi forze.

La pinza può facilmente manipolare oggetti come tazze. Credito:Università della California San Diego e JPL
Gli stessi adesivi geco sono realizzati in un processo in tre fasi. Un originale stampo adesivo master geco con milioni di strutture microscopiche viene realizzato in una camera bianca utilizzando un processo di fotolitografia. Quindi, copie in cera dello stampo principale possono essere realizzate a basso costo. I ricercatori possono quindi realizzare tante copie dei fogli adesivi dallo stampo in cera quante volte vogliono utilizzando un processo chiamato rivestimento a rotazione. Ciò consente loro di realizzare da 10 a 20 fogli adesivi in meno di un'ora. Nel frattempo, la stessa pinza robotica morbida è fusa in stampi di stampa 3D ed è realizzata in gomma a base di silicone.
I prossimi passi nella ricerca includono lo sviluppo di algoritmi per la presa che sfruttano gli adesivi, e studiando l'uso di questa pinza per operazioni a gravità zero e spaziali.