Credito:Massachusetts Institute of Technology
50 anni fa, il primo braccio robotico industriale chiamato Unimate assemblava una semplice colazione a base di pane tostato, caffè, e spumante. Anche se poteva sembrare un'impresa senza soluzione di continuità, ogni movimento e posizionamento è stato codificato con attenta considerazione.
Anche con i robot più intelligenti e adattivi di oggi, questo compito rimane difficile per le macchine con le mani rigide. Tendono a lavorare solo in ambienti strutturati con forme e posizioni predefinite, e in genere non può far fronte a incertezze nel posizionamento o nella forma.
Negli ultimi anni, anche se, i robotisti hanno affrontato questo problema facendo dita morbide, flessibile, materiali come la gomma. Questa flessibilità consente a questi robot morbidi di raccogliere qualsiasi cosa, dall'uva alle scatole e alle bottiglie d'acqua vuote, ma non sono ancora in grado di gestire oggetti grandi o pesanti.
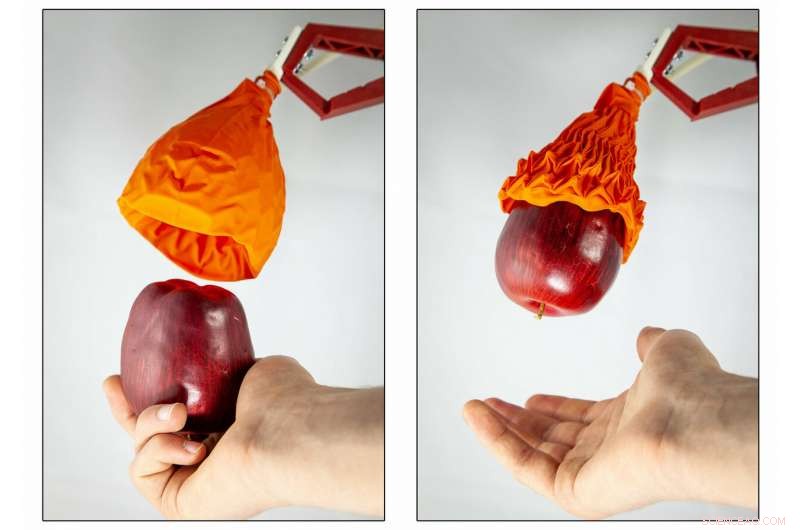
Per dare una mano a questi morbidi robot, ricercatori del MIT e di Harvard hanno sviluppato una nuova pinza morbida e resistente:una struttura origami a forma di cono che collassa sugli oggetti, molto simile a una Venere acchiappamosche, per raccogliere oggetti che sono fino a 100 volte il suo peso. Questo movimento consente alla pinza di afferrare una gamma molto più ampia di oggetti, come lattine di zuppa, martelli, bicchieri di vino, droni, e anche un singolo fiorellino di broccoli.
"Uno dei miei obiettivi è creare un robot in grado di imballare automaticamente la spesa per te, " dice la professoressa del MIT Daniela Rus, direttore del Computer Science and Artificial Intelligence Laboratory (CSAIL) del MIT, e uno degli autori senior di un nuovo articolo sul progetto.
"Gli approcci precedenti al problema dell'imballaggio potevano gestire solo classi molto limitate di oggetti:oggetti molto leggeri o oggetti che si conformano a forme come scatole e cilindri, ma con il sistema di presa Magic Ball abbiamo dimostrato che possiamo svolgere compiti di pick and place per una grande varietà di articoli che vanno dalle bottiglie di vino ai broccoli, uva e uova, " dice Rus. "In altre parole, oggetti pesanti e oggetti leggeri. Oggetti delicati, o robusto, o che hanno forme regolari o libere."
Il progetto è uno dei tanti negli ultimi anni che ha portato i ricercatori a pensare fuori dagli schemi con la progettazione di robot. Pinze a sfera, Per esempio, in grado di gestire una gamma più ampia di oggetti rispetto alle dita, ma hanno ancora il problema degli angoli limitati. Le dita robotiche più morbide utilizzano in genere aria compressa, ma non sono abbastanza forti per raccogliere oggetti più pesanti.
La struttura di questa nuova pinza, nel frattempo, assume una forma completamente diversa. A forma di cono, vuoto, e a vuoto, il dispositivo è stato ispirato dalla "sfera magica dell'origami" e può avvolgere un intero oggetto e raccoglierlo con successo.
La pinza ha tre parti:la struttura dello scheletro a base di origami, la pelle ermetica per racchiudere la struttura, e il connettore. Il team lo ha creato utilizzando uno stampo meccanico in gomma e una speciale plastica termoretraibile che si auto-piega ad alte temperature.
Lo scheletro della palla magica è ricoperto da un palloncino di gomma o da un sottile foglio di tessuto, non diversamente dalla precedente ricerca del team sui muscoli artificiali ispirati agli origami guidati dai fluidi (FOAM), che consisteva in una pelle ermetica che circondava uno scheletro pieghevole e un fluido.
Il team ha utilizzato la pinza con un robot standard per testarne la forza su diversi oggetti. La pinza potrebbe afferrare e sollevare oggetti il 70 percento del suo diametro, che gli ha permesso di raccogliere e trattenere una varietà di cibi morbidi senza causare danni. Potrebbe anche raccogliere bottiglie di peso superiore a quattro libbre.
"Aziende come Amazon e JD vogliono essere in grado di raccogliere una gamma più ampia di oggetti delicati o di forma irregolare, ma non è possibile con le pinze a dita e a ventosa, "dice Shuguang Li, un postdoc congiunto presso il MIT CSAIL e la John A. Paulson School of Engineering and Applied Sciences (SEAS) di Harvard. "Le ventose non possono raccogliere nulla con i fori - e avrebbero bisogno di qualcosa di molto più forte di una pinza a dita morbida".
Il robot attualmente funziona al meglio con oggetti cilindrici come bottiglie o lattine, che un giorno potrebbe renderlo una risorsa per le linee di produzione nelle fabbriche. Non sorprendentemente, la forma della pinza rende più difficile afferrare qualcosa di piatto, come un panino o un libro.
"Una delle caratteristiche chiave di questo approccio alla costruzione del manipolatore è la sua semplicità, "dice Robert Wood, co-autore e professore presso la School of Engineering di Harvard e il Wyss Institute for Biologically Inspired Engineering. "I materiali e le strategie di fabbricazione utilizzati ci consentono di prototipare rapidamente nuove pinze, personalizzato per oggetto o ambiente secondo necessità."
Nel futuro, il team spera di provare a risolvere il problema dell'angolo e dell'orientamento aggiungendo una visione artificiale che lascerebbe "vedere" la pinza e consentono di afferrare parti specifiche di oggetti.
"Questo è un dispositivo molto intelligente che utilizza la potenza della stampa 3D, un vuoto, e soft robotics per affrontare il problema della presa in un modo del tutto nuovo, "dice Michael Wehner, un assistente professore di robotica all'UC-Santa Cruz che non era coinvolto nel progetto. "Negli anni a venire, Potrei immaginare di vedere robot morbidi abbastanza gentili e abili da cogliere una rosa, ma abbastanza forte da sollevare in sicurezza un paziente ospedaliero".














