 Optimus Prime in forma bipede, dal film "The Transformers". Vedi altro immagini di robot . Immagine © 2007 Dreamworks Immagini
Optimus Prime in forma bipede, dal film "The Transformers". Vedi altro immagini di robot . Immagine © 2007 Dreamworks Immagini Senza dubbio, lo staff di HowStuffWorks è in ansia per il prossimo film "Transformers". Non ci chiediamo solo se andrà bene. Ci chiediamo se vedremo robot con le capacità dei Transformers durante le nostre vite. Mentre i Transformer su larga scala sembrano un po' poco plausibili - e poco pratici - si scopre che alcuni robot esistenti hanno molto in comune con i Transformers. In questo articolo, esploreremo l'aspetto di questi robot in trasformazione, come funzionano e come sono simili a Transformers come Optimus Prime.
Inizieremo con un'analisi dello stesso Prime. È enorme e impressionante, ma potrebbe mai essere reale? Per scoprirlo, abbiamo chiesto all'ingegnere Michael D. Belote cosa ci vorrebbe per costruire un autoarticolato a grandezza naturale che può trasformarsi in un robot bipede. In altre parole, cosa ci vorrebbe per realizzare una versione a grandezza naturale di Optimus Prime?
Primo, Prime deve essere un robot auto-riconfigurante . Alcuni robot auto-riconfiguranti, o robot che possono cambiare forma per svolgere compiti diversi, esistono oggi. Però, sono molto diversi da Optimus Prime. Come spiega Belote:
Con robot auto-riconfigurabili, l'ingegnere in genere preferisce mantenere l'individuo, moduli mobili piccoli, semplice, poco costoso, e intercambiabile; nel caso di Optimus Prime, però, si tratta di un robot i cui singoli moduli sono grandi quanto la cabina di un semirimorchio. Anche se la costruzione di tali moduli fosse possibile, la spesa sarebbe esorbitante, e la straordinaria complessità renderebbe virtualmente impossibile far funzionare correttamente tutti i sistemi insieme.Se gli ingegneri scoprissero come realizzare moduli intercambiabili sulla scala di Optimus Prime, potrebbe essere ancora impossibile fornire il potere di spostarli. Nella sua forma di veicolo, Optimus Prime può funzionare con il normale carburante diesel. Ma camminare è molto meno efficiente del rotolare su ruote. Per camminare, Prime avrebbe bisogno di molta più potenza di quella che potrebbe fornire un motore diesel. Ecco l'analisi di Belote su come gestire i requisiti di alimentazione di Prime:
I robot tradizionali sono costruiti su una delle tre fonti di alimentazione:elettrica, pneumatico, o idraulico. A causa dei pesi estremi coinvolti, l'energia idraulica è la fonte più probabile per Prime, perché gli attuatori idraulici forniscono rapporti potenza-peso molto elevati (grande potenza per piccoli input di potenza).Quindi l'energia idraulica potrebbe consentire a Prime di camminare, ma il sistema idraulico stesso creerebbe una diversa serie di problemi. "Un serbatoio o serbatoio deve essere aggiunto per contenere il fluido idraulico, "dice Belote, "sono necessarie pompe idrauliche; una fonte di alimentazione secondaria deve essere utilizzata per alimentare la pompa; sono necessarie valvole per soddisfare le pressioni e le portate appropriate". Inoltre, un Prime ad azionamento idraulico dovrebbe essere rivestito con tubazioni per trasportare il fluido idraulico. Questi tubi, insieme alle linee del carburante e al cablaggio elettrico di Prime, dovrebbe rimanere intatto o addirittura intatto durante la trasformazione.
Dopo essere sopravvissuto alla trasformazione in forma di robot, Prime dovrebbe quindi camminare come un bipede. Belote descrive cosa sarebbe necessario perché ciò accadesse:poiché i semilavorati tradizionali superano spesso le 30 tonnellate di peso, il peso finale di Prime potrebbe facilmente essere compreso tra 35 e 40 tonnellate. Confrontalo con il miglior robot "camminante" del mondo, Robot ASIMO di Honda, che ha un peso totale di 119 libbre e tuttavia può camminare solo per circa 40 minuti (alimentato elettricamente) e ad una velocità massima inferiore a 2 mph. Il rapporto peso per ASIMO è di 2,3 libbre per pollice, rispetto al rapporto in peso di Prime, che probabilmente supererebbe da 75 a 80 libbre per pollice - un aumento di trenta volte.
Inoltre, i robot non possono imitare facilmente il movimento del camminare. "Con un robot, "Belot spiega, "c'è un comando diretto (importo 'x' della gamba di sollevamento, inclina in avanti l'importo "y", estendere la gamba verso il basso dell'importo 'z', e così via). Con gli umani, però, non esiste un meccanismo di "feedback" - il tuo cervello non comunica costantemente alle tue gambe su dove essere posizionato. Anziché, ti pieghi semplicemente in avanti e cadi, ' impostare la gamba per assorbire lo shock quando il piede entra in contatto con il pavimento."
Quindi non è probabile che potremmo vedere un Optimus Prime funzionante o un robot come lui nelle nostre vite. Ma i robot che possono cambiare forma o diventare qualsiasi forma esistono già. Ne esamineremo alcuni - e come si confrontano con Prime - nella prossima sezione.
Contenuti
 Optimus Prime può essere sia un robot bipede che un semirimorchio. Immagine © 2007 Dreamworks Immagini
Optimus Prime può essere sia un robot bipede che un semirimorchio. Immagine © 2007 Dreamworks Immagini La cosa più bella di Transformers, Certo, è che possono assumere due forme completamente diverse. La maggior parte possono essere robot bipedi o veicoli da lavoro. Alcuni possono invece trasformarsi in armi o dispositivi elettronici. Le due forme di un trasformatore hanno punti di forza e capacità molto diversi.
Questo è completamente diverso dalla maggior parte dei robot reali, che di solito sono bravi solo a svolgere un compito o alcuni compiti correlati. I rover di esplorazione di Marte, Per esempio, può fare quanto segue:
 Rappresentazione artistica di un Mars Exploration Rover sulla superficie di Marte Immagine per gentile concessione della NASA
Rappresentazione artistica di un Mars Exploration Rover sulla superficie di Marte Immagine per gentile concessione della NASA Un Exploration Rover non sarebbe molto bravo in compiti che non rientrano in queste categorie. non può, Per esempio, montare un ponte, inserirsi in spazi molto piccoli o costruire altri robot. In altre parole, sarebbe uno schifoso robot di ricerca e salvataggio, e non si adatterebbe affatto in una fabbrica automatizzata.
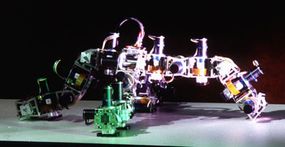
 Lo Snakebot della NASA è un esempio di robot a catena. Immagine per gentile concessione della NASA
Lo Snakebot della NASA è un esempio di robot a catena. Immagine per gentile concessione della NASA 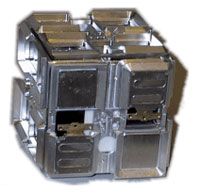 Un modulo Telecube G2 Immagine gentilmente concessa da Palo Alto Research Center Incorporated
Un modulo Telecube G2 Immagine gentilmente concessa da Palo Alto Research Center Incorporated Ecco perché gli ingegneri stanno sviluppando riconfigurare i robot . come trasformatori, questi robot possono cambiare forma per adattarsi al compito da svolgere. Ma invece di cambiare da una forma a un'altra forma, come un robot bipede a un autoarticolato, la riconfigurazione dei robot può assumere molte forme. Sono molto più piccoli di quelli che sarebbero i veri Transformers; qualche robot di riconfigurazione moduli sono abbastanza piccoli da stare nella mano di una persona.
Un modulo è essenzialmente un piccolo, robot relativamente semplice o pezzo di robot. I robot modulari sono fatti di molti di questi piccoli, moduli identici. Un robot modulare può essere costituito da pochi moduli o da molti, a seconda del design del robot e del compito che deve eseguire. Alcuni robot modulari attualmente esistono solo come simulazioni al computer; altri sono ancora nelle prime fasi di sviluppo. Ma funzionano tutti secondo lo stesso principio di base:molti piccoli robot possono combinarsi per crearne uno grande.
I moduli non possono fare molto da soli. Un sistema di riconfigurazione deve anche avere:
La maggior parte modulare, i robot di riconfigurazione rientrano in una delle tre categorie:catena, reticolo e configurazione modulare. Robot a catena sono lunghe catene che possono collegarsi tra loro in punti specifici. A seconda del numero di catene e di dove si collegano, questi robot possono assomigliare a serpenti o ragni. Possono anche diventare anelli rotanti o bipedi, robot ambulanti. Una serie di catene modulari potrebbe percorrere un percorso a ostacoli strisciando attraverso un tunnel come un serpente, attraversando un terreno roccioso come un ragno e cavalcando un triciclo su un ponte come un bipede.
Esempi di robot a catena sono Polybot e Polypod del Palo Alto Research Center (PARC) e Snakebot della NASA. La maggior parte ha bisogno di un essere umano o, in teoria, un altro robot, per fissare manualmente i collegamenti con le viti.
Robot simulati
Le simulazioni al computer sono una parte vitale della ricerca robotica, in particolare con la riconfigurazione dei robot. Gli scienziati usano i computer per capire come i moduli si sposteranno l'uno rispetto all'altro prima di insegnare ai moduli come farlo. In alcuni casi, le simulazioni al computer esistono molto prima dei robot reali. Il Rus Robotics Laboratory del Massachusetts Institute of Technology (MIT) ha numerose simulazioni di come questi robot si muovono.
 I moduli Molecule del Rus Robotics Laboratory presentano due cubi collegati con un angolo di 90 gradi. Una superficie su ogni cubo ospita il legame che lo collega all'altra metà del modulo. Le altre cinque superfici possono essere agganciate ad altri moduli. Immagine gentilmente concessa da Keith Kotay/Rus Robotics Laboratory
I moduli Molecule del Rus Robotics Laboratory presentano due cubi collegati con un angolo di 90 gradi. Una superficie su ogni cubo ospita il legame che lo collega all'altra metà del modulo. Le altre cinque superfici possono essere agganciate ad altri moduli. Immagine gentilmente concessa da Keith Kotay/Rus Robotics Laboratory L'idea di base di a robot a reticolo è che sciami di piccoli, moduli identici che possono combinarsi per formare un robot più grande. Esistono già diversi prototipi di robot reticolari, ma alcuni modelli esistono solo come simulazioni al computer. I robot reticolati si muovono strisciando l'uno sull'altro, attaccandosi e staccandosi dai punti di connessione sui robot vicini. È come il modo in cui le tessere si muovono in un puzzle di tessere scorrevoli. Questo metodo di movimento si chiama riconfigurazione del substrato – i robot possono muoversi solo lungo punti all'interno del reticolo dei robot. I moduli Lattice possono avere fonti di alimentazione autonome, oppure possono condividere le fonti di alimentazione attraverso le loro connessioni ad altri moduli.
I robot a traliccio possono muoversi su terreni difficili arrampicandosi l'uno sull'altro, seguendo la conformazione del terreno, oppure possono formare un solido, superficie stabile per supportare altre strutture. Un numero sufficiente di robot a reticolo può creare praticamente qualsiasi forma. Le simulazioni al computer mostrano che cambiano da una pila di parti a una tazza da tè e da un cane a un divano. I moduli possono combinarsi per realizzare superfici piane, scale, appendici mobili e praticamente qualsiasi altra forma immaginabile. Quindi un robot reticolare è più simile a un Terminator T-1000 che a un trasformatore.
I laboratori di robotica hanno creato e teorizzato diversi sistemi di robot a reticolo:
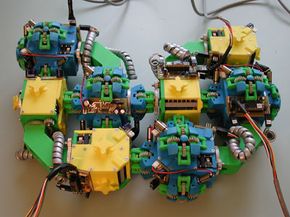
 I robot dello sciame possono manovrare indipendentemente, oppure possono combinarsi per completare compiti che non potrebbero svolgere da soli. Immagine per gentile concessione del professor Marco Dorigo
I robot dello sciame possono manovrare indipendentemente, oppure possono combinarsi per completare compiti che non potrebbero svolgere da soli. Immagine per gentile concessione del professor Marco Dorigo Come i robot reticolari, robot mobili di riconfigurazione sono piccoli, moduli identici che possono combinarsi per formare robot più grandi. Però, non hanno bisogno dell'aiuto dei vicini per spostarsi da un posto all'altro:possono spostarsi da soli. I robot di configurazione mobile sono molto simili alle rappresentazioni dei cartoni animati di banchi di pesci o stormi di uccelli che si combinano per creare uno strumento o una struttura. Si muovono in modo indipendente fino a quando non hanno bisogno di riunirsi per svolgere un compito specifico. Sciame-bot , un progetto del programma Future and Emerging Technologies nell'Unione Europea, sono robot di riconfigurazione mobili.
Anche se questi robot sembrano molto diversi l'uno dall'altro, hanno molte somiglianze nel modo in cui si muovono e operano. Vedremo questi dopo.
Un vero trasformatoreI trasformatori non sono necessariamente pratici o addirittura possibili su larga scala. Ma gli ingegneri di Himeji Soft Works hanno sviluppato un robot su piccola scala che si trasforma davvero da un'auto a un bipede e ritorno. Puoi vedere un video di questo robot, compresa la sua trasformazione, su YouTube.
 I trasformatori sono consapevoli di sé e possono prendere decisioni da soli, ma le loro parti mobili non sono autonome. Immagine © 2007 Dreamworks Immagini
I trasformatori sono consapevoli di sé e possono prendere decisioni da soli, ma le loro parti mobili non sono autonome. Immagine © 2007 Dreamworks Immagini Oltre alle dimensioni e alla struttura modulare, i robot auto-riconfiguranti sono diversi dai trasformatori in un modo importante. Optimus Prime e gli altri Transformer sono consapevoli di sé e possono prendere decisioni indipendenti, e mantengono i loro cervelli in una posizione all'interno dei loro corpi. Il cervello di un trasformatore controlla ciascuna delle sue parti mobili, e le parti stesse hanno poca o nessuna autonomia.
Nella maggior parte delle configurazioni di robot modulari, anche se, ogni modulo ha un certo potere decisionale e aiuta a capire dove si sposterà. Invece di un modulo essere il capo di tutti gli altri, le capacità di pianificazione e movimento sono distribuito su tutti i moduli.
Questa idea -- uno sciame di piccoli robot, ognuno dei quali decide dove andrà a finire -- potrebbe sembrare disastroso. Ma i moduli sono programmati con una serie di regole basate sulla geometria su come muoversi. Sono anche programmati con algoritmi che ne governano il movimento. Questi algoritmi e regole consentono ai robot di capire come passare da una forma all'altra e come muoversi sul terreno.
Per manovre molto complesse, i robot invece pianificano una serie di sotto-forme piuttosto che cercare di apportare un cambiamento importante in un solo passaggio. Per esempio, un robot reticolare che deve passare da una pila casuale di moduli a un robot bipede potrebbe prima formare le gambe. Quindi, potrebbe usare quelle gambe come impalcatura per costruire la metà superiore del robot.
 Attualmente, ogni sistema robot modulare ha le proprie regole per governare come si muove e si riconfigura. Immagine gentilmente concessa da Palo Alto Research Center Incorporated
Attualmente, ogni sistema robot modulare ha le proprie regole per governare come si muove e si riconfigura. Immagine gentilmente concessa da Palo Alto Research Center Incorporated A quest'ora, molti di questi robot possono effettuare da soli semplici passaggi da una forma all'altra. Cambiamenti più complessi potrebbero richiedere l'aiuto di uno scienziato, rendendo la collezione di robot semi-autonoma piuttosto che autonoma. Alcuni robot che sono ancora nelle prime fasi di sviluppo ricevono tutte le istruzioni da una workstation e non prendono decisioni da soli.
Attualmente, la maggior parte dei robot riconfiguranti ha il proprio sistema di regole e algoritmi, e i set di regole funzionano solo per i robot per i quali sono stati progettati. In altre parole, le regole per il Cristallo del Laboratorio di Robotica Rus non funzioneranno con Molecola.
Però, gli scienziati stanno utilizzando simulazioni al computer per ricercare teorie del movimento che potrebbero funzionare indipendentemente dall'aspetto di un modulo robotico. Queste teorie potrebbero stabilire regole di base per il movimento dei robot, Compreso:
In caso di successo, questa ricerca potrebbe rendere più facile per gli ingegneri creare nuovi, robot modulari funzionanti che seguono le stesse regole di movimento.
Anche se questi robot non camminano e parlano come fanno i Transformers, possono cambiare praticamente in qualsiasi forma, data la giusta programmazione e istruzioni. Per saperne di più su di loro e sui Transformers, vedere i link nella pagina successiva.
Dove tengono il cervello i trasformatori?
Mentre lavoravo a questo articolo, lo staff di HowStuffWorks ha avuto una vivace discussione su dove i Transformers tengono il cervello. Abbiamo tutti intuito la stessa risposta:il cervello di un Transformer deve essere nella sua testa (o nella sua cabina di pilotaggio in forma di veicolo). Molte rappresentazioni di fumetti e cartoni animati sembrano supportare questa idea. Però, non spiega del tutto come le parti di Optimus Prime possono funzionare separatamente, a meno che Prime non utilizzi segnali radio o infrarossi per inviare e ricevere comandi. Inoltre, non spiega del tutto perché le personalità dei Constructicon siano diverse da quelle dei loro componenti Transformers. Puoi leggere di più sul cervello dei Transformers e su come funzionano a The Matrix, una rivista Transformers non ufficiale.
Fonti














