Insetti robotici, come l'Entomopter sviluppato al Georgia Institute of Technology, potrebbe darci uno sguardo senza precedenti sul nostro mondo. Foto per gentile concessione di GTRI/Stanley Leary
Insetti robotici, come l'Entomopter sviluppato al Georgia Institute of Technology, potrebbe darci uno sguardo senza precedenti sul nostro mondo. Foto per gentile concessione di GTRI/Stanley Leary Il nostro paese è in guerra in un territorio sconosciuto, e una battaglia sta per iniziare. Le truppe di terra nemiche si stanno posizionando per attaccare il nostro esercito, situato a soli 2 miglia (3,2 km) di distanza. Però, il nemico non sa che ogni sua mossa è monitorata da insetti robotici dotati di minuscole telecamere, volare sopra la testa. Questi minuscoli volantini robotici, chiamato microveicoli aerei (MAV), sarà in grado di ronzare sul territorio nemico quasi inosservato dalle truppe nemiche sottostanti. Pochi guarderebbero anche due volte questi robot volanti di una monetina.
Il Dipartimento della Difesa degli Stati Uniti sta spendendo milioni di dollari per sviluppare questi MAV. Sono il modo perfetto per tenere i soldati fuori dai guai durante le missioni di ricognizione. Oggi, raccogliere ricognizioni durante la battaglia in genere comporta mettere in pericolo piccole squadre di soldati o grandi aerei. Allo stesso tempo, le immagini satellitari non sono immediatamente accessibili da un soldato di terra.
La Defense Advance Research Projects Agency (DARPA) sta finanziando diversi team di ricerca per sviluppare MAV non più grandi di 6 pollici (15 cm) di lunghezza, larghezza e altezza. Questi minuscoli velivoli saranno di un ordine di grandezza più piccoli di qualsiasi altro veicolo aereo senza pilota (UAV) sviluppato fino ad oggi. Una classe di questi MAV è stata progettata per imitare i movimenti di volo di alcuni insetti, comprese le mosche, api e libellule. In questo articolo, ci concentreremo su questi MAV simili a bug. Imparerai come volano le mosche, come possono essere costruite le macchine per imitare i loro movimenti e dove verranno schierati questi minuscoli dispositivi aerei.
Contenuti
 Un modello di un insetto volante micromeccanico seduto nel palmo della mano di un ricercatore di Berkeley Foto per gentile concessione di Jason Spingarn-Koff
Un modello di un insetto volante micromeccanico seduto nel palmo della mano di un ricercatore di Berkeley Foto per gentile concessione di Jason Spingarn-Koff Le mosche hanno molto da insegnarci sull'aviazione che non si può imparare studiando gli aerei ad ala fissa. Per anni, si sapeva poco della meccanica del volo degli insetti, eppure sono il gruppo di aviatori più antico del mondo, a volte chiamato jet da combattimento della natura . Potresti aver sentito parlare di come i bombi non possono volare secondo l'aerodinamica convenzionale. Questo perché i principi alla base del volo degli insetti sono molto diversi da quelli alla base del volo degli aeroplani ad ala fissa.
"Gli ingegneri dicono di poter dimostrare che un calabrone non può volare, " disse Michael Dickinson , un biologo dell'Università della California, Berkeley. "E se applichi agli insetti la teoria dei velivoli ad ala fissa, si calcola che non possono volare. Devi usare qualcosa di diverso".
Dickinson fa parte del progetto Micromechanical Flying Insect (MFI), che sta sviluppando piccoli robot volanti utilizzando i principi di volo degli insetti. Il progetto è in collaborazione con DARPA. Il progetto MFI propone un insetto robotico di circa 10-25 millimetri (da 0,39 a 0,98 pollici) di larghezza, che è molto più piccolo del limite di dimensione di DARPA di 6 pollici (15 cm), e userà le ali sbattute per volare. L'obiettivo del progetto è ricreare il volo di un moscone.
Se leggi l'articolo Come funzionano gli aeroplani, sai che gli aeroplani generano portanza a causa dell'aria che viaggia più velocemente sopra la parte superiore dell'ala che lungo la parte inferiore dell'ala. Questo è chiamato aerodinamica stazionaria . Lo stesso principio non può essere applicato a mosche o api, perché le loro ali sono in continuo movimento.
"A differenza degli aerei ad ala fissa con la loro costante, dinamica del flusso quasi viscosa (senza viscosità), gli insetti volano in un mare di vortici, circondato da piccoli vortici e turbini che si creano quando muovono le ali, " disse Z. Jane Wang , un fisico al College of Engineering della Cornell University. Un vortice è un vortice d'aria creato dall'ala, e l'aria nel vortice scorre nella direzione opposta alla corrente d'aria principale.
I vortici creati dalle ali degli insetti mantengono gli insetti in alto. Il gruppo di Dickinson delinea questi tre principi per spiegare come gli insetti ottengono sollevamento e rimangono in volo:
"Sarebbe un vero furbetto se potessimo sfruttare questi meccanismi, pure, costruendo un robot insetto. Ma non puoi costruirli ora sulla base di principi noti:devi ripensare fondamentalmente il problema, " disse Dickinson. Nella sezione successiva, imparerai come i ricercatori stanno prendendo questi principi e li applicano alla creazione di insetti volanti robotici.
Ci sono almeno due progetti MAV finanziati dalla DARPA che sono stati ispirati dai principi del volo degli insetti. Mentre Michael Dickinson sta creando l'insetto volante micromeccanico a Berkeley, Robert Michelson , un ingegnere di ricerca presso il Georgia Institute of Technology, sta lavorando al entomottero . Diamo un'occhiata più da vicino a entrambi i progetti.
Nel luglio 2000, l'Ufficio Brevetti degli Stati Uniti ha concesso un brevetto alla Georgia Tech Research Corporation per l'invenzione di Michelson dell'Entomopter, chiamato anche a insetto elettromeccanico multimodale . L'Entomopter è stato progettato per possibili operazioni indoor, secondo il brevetto USA numero 6, 082, 671. Imiterà la lotta di un insetto sbattendo le ali per generare portanza. Inoltre, i ricercatori stanno studiando il modo in cui Entomopter può navigare nei corridoi e nei sistemi di ventilazione e strisciare sotto le porte.
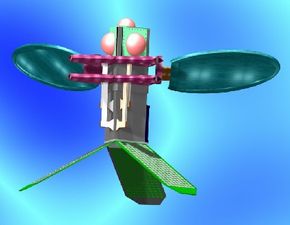
Diamo un'occhiata alle parti di base dell'Entomopter:
L'entomottero è alimentato da una reazione chimica. Un monopropellente viene iniettato nel corpo, provocando una reazione chimica che rilascia un gas. La pressione del gas che si accumula spinge un pistone nella fusoliera. Questo pistone è collegato alle ali accoppiate a perno, facendoli sbattere rapidamente. Parte del gas viene scaricato attraverso le prese d'aria nell'ala e può essere utilizzato per cambiare l'ascensore su entrambe le ante in modo che il veicolo possa girare. Attualmente, l'entomottero ha un'apertura alare di 10 pollici (25 cm). "Il prossimo passo è ridurre il dispositivo RCM alla dimensione del bug, " ha detto Michelson.
In un veicolo delle dimensioni di una mosca domestica, ogni parte deve eseguire più attività. Per esempio, un'antenna radio fissata sul retro del veicolo può fungere anche da stabilizzatore per la navigazione. Le gambe potrebbero immagazzinare carburante per la regolazione del peso e dell'equilibrio del veicolo durante il volo.
 Il concetto di un artista dell'insetto volante micromeccanico completato in fase di sviluppo a Berkeley Foto per gentile concessione di R.Fearing/UC-Berkeley
Il concetto di un artista dell'insetto volante micromeccanico completato in fase di sviluppo a Berkeley Foto per gentile concessione di R.Fearing/UC-Berkeley Il governo degli Stati Uniti ha anche investito 2,5 milioni di dollari nel progetto Berkeley per sviluppare un insetto robotico delle dimensioni di una comune mosca domestica. Il primo passo importante per ottenerlo insetto volante micromeccanico (MFI) nell'aria era lo sviluppo di Robfly , che ha fornito ai ricercatori importanti informazioni sui meccanismi del volo degli insetti.
Per costruire l'IFM, i ricercatori hanno eseguito esperimenti per imparare come volano le mosche. Uno degli esperimenti prevedeva la costruzione di un paio di ali robotiche da 10 pollici (25 cm), chiamato Robfly , che era fatto di plexiglass e modellato sulle ali di un moscerino della frutta. Le ali erano immerse in un serbatoio di olio minerale, che li costringe a reagire come più piccoli, Ali di mosca della frutta lunghe 1 millimetro che battono rapidamente nell'aria. Sei motori - tre su ogni ala - muovevano le ali avanti e indietro, su e giù e con un movimento rotatorio. Sono stati collegati sensori per misurare la forza delle ali.
Infine, il Robofly sarà ridotto a una mosca microrobotica in acciaio inossidabile con una larghezza da 10 a 25 millimetri (da 0,4 a 1 pollice) e un peso di circa 43 milligrammi (0,002 once). Le ali saranno costituite da un sottile film di Mylar. L'energia solare funzionerà a piezoelettrico attuatore che spingerà le ali a sbattere. Il torace del robot trasformerà le deviazioni dell'attuatore piezoelettrico nella grande corsa dell'ala e nella rotazione necessarie per ottenere il volo.
Sebbene il robot non voli ancora, è stato riportato che circa il 90% della forza richiesta per il sollevamento è stato raggiunto sperimentalmente con un motore completamente operativo, struttura a due ali. Il prossimo passo sarà aggiungere un'unità di controllo di volo e un'unità di comunicazione per il controllo remoto. I ricercatori affermano che stanno lavorando per consentire l'hovering controllato tramite rilevamento ottico e un giroscopio a bordo.
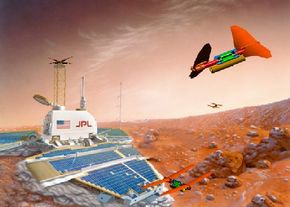 Un'idea artistica di un team di Entomopters che esplorano Marte Foto per gentile concessione di Robert Michelson
Un'idea artistica di un team di Entomopters che esplorano Marte Foto per gentile concessione di Robert Michelson Considerando la quantità di denaro che l'esercito americano sta pompando nei progetti MAV (micro-veicolo aereo), è probabile che il primo utilizzo di questi insetti robotici sarà come mosche spia. DARPA immagina una mosca spia che potrebbe essere utilizzata per missioni di ricognizione e controllata da soldati a terra. Questo piccolo veicolo volante non trasmetterebbe solo immagini di movimenti di truppe, ma potrebbe anche essere usato per rilevare fattori biologici, armi chimiche o nucleari. Inoltre, l'insetto robotico sarebbe in grado di atterrare su un veicolo nemico e posizionare un tag elettronico su di esso in modo da poter essere preso di mira più facilmente.
In un rapporto del 1997 della DARPA sullo sviluppo dei MAV, gli autori hanno scritto che i progressi nelle microtecnologie, Compreso sistemi microelettromeccanici (MEM), presto renderebbe le mosche spia un'idea fattibile. Ha sottolineato che i microsistemi come le telecamere CCD-array, minuscoli sensori a infrarossi e rilevatori di sostanze pericolose delle dimensioni di un chip vengono realizzati abbastanza piccoli da integrarsi nell'architettura di una mosca spia.
I militari vorrebbero un MAV con una portata di circa 6,2 miglia (10 km), vola di giorno o di notte e può rimanere in volo per circa un'ora. I funzionari della DARPA affermano che la velocità ideale per un MAV è compresa tra 35,4 e 72,4 km/h da 22 a 45 mph. Sarebbe controllato da una stazione di terra, che impiegherebbe antenne direzionali e manterrebbe un contatto continuo con il MAV.
Le mosche robotiche potrebbero anche essere adatte come una nuova generazione di esploratori interplanetari. Il Georgia Tech Research Institute (GTRI) ha ricevuto finanziamenti dal NASA Institute for Advanced Concepts (NIAC) per studiare l'idea utilizzando l'Entomopter come un rilevatore volante di Marte. Nel marzo 2001, La NASA ha finanziato la seconda fase dello studio in previsione delle future micromissioni su Marte.
Gli entomotteri offrono diversi vantaggi rispetto ai topografi più grandi. potrebbero atterrare, decollare, librarsi ed eseguire manovre più difficili in volo. La loro capacità di gattonare e volare dà loro anche un vantaggio nell'esplorazione di altri pianeti. Più probabilmente, La NASA invierebbe dozzine di questi veicoli di sorveglianza per esplorare altri pianeti. Lo sviluppatore di Entomopter Rob Michelson ha affermato che la versione marziana dell'Entomopter dovrebbe essere dimensionata per avere un'apertura alare di circa 1 metro per poter volare nella sottile atmosfera di Marte.
I ricercatori affermano che questi minuscoli robot volanti sarebbero preziosi anche in seguito a disastri naturali, come terremoti, tornado o frane. Le loro piccole dimensioni e la capacità di volare e librarsi li rendono utili per la ricerca di persone sepolte tra le macerie. Potrebbero volare tra fessure in cui gli umani e le macchine più grandi non sono in grado di navigare. Altri usi includono il monitoraggio del traffico, sorveglianza delle frontiere, indagini sulla fauna selvatica, ispezione della linea elettrica e fotografia aerea immobiliare.
Le mosche spia sono un altro esempio di come la tecnologia aiuti gli esseri umani a svolgere compiti pericolosi, permettendo agli umani di stare fuori dai guai. ricognizione militare, cercare le vittime del terremoto e viaggiare in altri mondi sono tutte attività pericolose:i microrobot volanti ci permetterebbero di svolgere questi compiti senza essere effettivamente lì.