Un autoritratto del rover Curiosity Mars della NASA. Credito:NASA/JPL-Caltech/MSSS
La selezione di un sito di atterraggio per un rover diretto su Marte è un processo lungo che normalmente coinvolge grandi comitati di scienziati e ingegneri. Questi comitati in genere trascorrono diversi anni soppesando gli obiettivi scientifici di una missione rispetto ai vincoli ingegneristici di un veicolo, per identificare siti scientificamente interessanti e sicuri su cui atterrare.
Ad esempio, il team scientifico di una missione potrebbe voler esplorare determinati siti geologici alla ricerca di segni d'acqua, vita, e abitabilità. Ma gli ingegneri potrebbero scoprire che quei siti sono troppo ripidi per consentire a un veicolo di atterrare in sicurezza, oppure le posizioni potrebbero non ricevere abbastanza luce solare per alimentare i pannelli solari del veicolo una volta atterrato. Trovare un sito di atterraggio adatto implica quindi mettere insieme le informazioni raccolte negli anni dalle passate missioni su Marte. Questi dati, pur crescendo ad ogni missione, sono irregolari e incompleti.
Ora i ricercatori del MIT hanno sviluppato uno strumento software per la scoperta assistita da computer che potrebbe aiutare i pianificatori delle missioni a prendere queste decisioni. Produce automaticamente mappe di siti di atterraggio favorevoli, utilizzando i dati disponibili sulla geologia e sul terreno di Marte, nonché un elenco di priorità scientifiche e vincoli ingegneristici che un utente può specificare.
Come esempio, un utente può stabilire che un rover dovrebbe atterrare in un sito in cui può esplorare determinati obiettivi geologici, come i laghi a bacino aperto. Allo stesso tempo, il sito di atterraggio non deve superare una certa pendenza, altrimenti il veicolo si ribalterebbe durante il tentativo di atterrare. Il programma genera quindi una "mappa di preferenza" dei siti di atterraggio che soddisfano entrambi i vincoli. Queste posizioni possono spostarsi e cambiare man mano che un utente aggiunge ulteriori specifiche.
Il programma può anche tracciare possibili percorsi che un rover può prendere da un determinato sito di atterraggio a determinate caratteristiche geologiche. Ad esempio, se un utente specifica che un rover dovrebbe esplorare le esposizioni di rocce sedimentarie, il programma produce percorsi per tali strutture vicine e calcola il tempo che impiegherebbe per raggiungerle.
Vittorio Pancrazio, principale ricercatore presso il Kavli Institute for Astrophysics and Space Research del MIT, afferma che i pianificatori di missione possono utilizzare il programma per considerare in modo rapido ed efficiente diversi scenari di atterraggio ed esplorativi.
"Questo non sostituirà mai il comitato vero e proprio, ma può rendere le cose molto più efficienti, perché puoi giocare con diversi scenari mentre parli, "dice Pancrazio.
Lo studio del team è stato pubblicato online il 31 agosto da Scienze della Terra e dello Spazio e fa parte del numero online dell'8 settembre della rivista.
Nuovi siti
Pankratius e il postdoc Guillaume Rongier, nel Dipartimento della Terra del MIT, Scienze Atmosferiche e Planetarie, ha creato il programma per identificare i siti di atterraggio favorevoli per una missione concettuale simile al rover Mars 2020 della NASA, che è progettato per atterrare in orizzontale, anche, aree prive di polvere e si propone di esplorare un antico, potenzialmente abitabile, sito con affioramenti magmatici.
Hanno scoperto che il programma ha identificato molti siti di atterraggio per il rover che sono stati considerati in passato, e ha evidenziato altri siti di atterraggio promettenti che raramente sono stati proposti. "Vediamo che ci sono siti che potremmo esplorare con le tecnologie dei rover esistenti, che i comitati del sito di atterraggio potrebbero voler riconsiderare, "dice Pancrazio.
Il programma potrebbe anche essere utilizzato per esplorare i requisiti ingegneristici per le future generazioni di rover su Marte. "Supponendo che tu possa atterrare su curve più ripide, o guidare più veloce, quindi possiamo ricavare quali nuove regioni puoi esplorare, "dice Pancrazio.
Un atterraggio sfocato
Il software si basa in parte su "logica fuzzy, " uno schema logico matematico che raggruppa le cose non in modo binario come la logica booleana, come sì/no, vero falso, o sicuro/non sicuro, ma in modo più fluido, moda basata sulla probabilità.
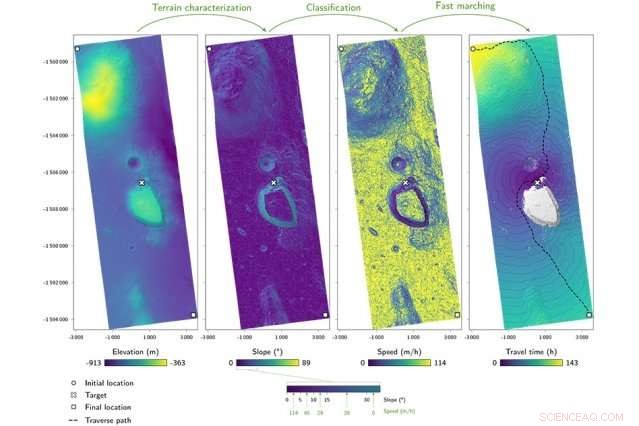
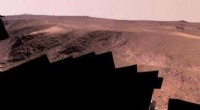
La figura mostra i passaggi successivi per imitare un rover che gira intorno a Marte. I ricercatori del MIT hanno sviluppato un metodo per caratterizzare prima il terreno nell'area di interesse. Sulla base di tale caratterizzazione e delle caratteristiche del rover, usano un algoritmo di "marcia veloce" per stimare la velocità del rover, che usano per calcolare il tempo necessario per guidare ovunque su quell'area. Possono anche stimare il percorso più breve da una posizione iniziale, a un obiettivo, a una posizione finale. Credito:NASA/JPL/Università dell'Arizona, Guillaume Rongier
"Tradizionalmente questa idea viene dalla matematica, dove invece di dire che un elemento appartiene a un insieme, sì o no, la logica fuzzy dice che appartiene con una certa probabilità, " riflettendo così informazioni incomplete o imprecise, Pancrazio spiega.
Nel contesto della ricerca di un sito di atterraggio adatto, il programma calcola la probabilità che un rover possa salire una certa pendenza, con la probabilità decrescente man mano che la posizione di a diventa più ripida.
"Con la logica fuzzy possiamo esprimere questa probabilità spazialmente:quanto è grave se sono così ripido, contro questo ripido, " Dice Pankratius. "È un modo per affrontare l'imprecisione, in un modo."
Utilizzando algoritmi legati alla logica fuzzy, la squadra crea raw, o iniziale, mappe di preferenza di possibili siti di atterraggio su tutto il pianeta. Queste mappe sono raggruppate in una griglia in singole celle, ciascuno rappresenta circa 3 chilometri quadrati sulla superficie di Marte. Il programma calcola, per ogni cella, la probabilità che sia un luogo di atterraggio favorevole, e genera una mappa graduata per colore per rappresentare probabilità comprese tra 0 e 1. Le celle più scure rappresentano i siti con una probabilità vicina allo zero di essere un sito di atterraggio favorevole, mentre le località più leggere hanno maggiori possibilità di approdo sicuro con interessanti prospettive scientifiche.
Una volta generata una mappa grezza dei possibili siti di atterraggio, i ricercatori tengono conto di varie incertezze nel luogo di atterraggio, come cambiamenti di traiettoria e potenziali errori di navigazione durante la discesa. Considerando queste incertezze, il programma quindi genera ellissi di atterraggio, o bersagli circolari dove è probabile che un rover atterri per massimizzare la sicurezza e l'esplorazione scientifica.
Il programma utilizza anche un algoritmo noto come marcia veloce per tracciare i percorsi che un rover può percorrere su un determinato terreno una volta atterrato. La marcia veloce è tipicamente usata per calcolare la propagazione di un fronte, come la velocità con cui un fronte di vento raggiunge una riva se viaggia a una data velocità. Per la prima volta, Pankratius e Rongier hanno applicato la marcia veloce per calcolare il tempo di viaggio di un rover mentre viaggia da un punto di partenza a una struttura geologica di interesse.
"Se sei da qualche parte su Marte e ottieni questa mappa elaborata, Puoi chiedere, 'Da qui, quanto velocemente posso andare in qualsiasi punto nei miei dintorni? E questo algoritmo ti dirà, "dice Pancrazio.
L'algoritmo può anche tracciare percorsi per evitare determinati ostacoli che potrebbero rallentare il viaggio di un rover, e tracciare le probabilità di colpire determinati tipi di strutture geologiche in un'area di atterraggio.
"È più difficile per un rover guidare attraverso la polvere, quindi andrà a un ritmo più lento, e la polvere non è necessariamente ovunque, solo a chiazze, " dice Rongier. "L'algoritmo prenderà in considerazione tali ostacoli durante la mappatura dei percorsi di attraversamento più veloci".
I team affermano che gli operatori degli attuali rover sulla superficie marziana possono utilizzare il programma software per dirigere i veicoli in modo più efficiente verso i siti di interesse scientifico. Nel futuro, Pankratius immagina questa tecnica o qualcosa di simile da integrare in rover sempre più autonomi che non richiedono agli esseri umani di azionare i veicoli tutto il tempo dalla Terra.
"Un giorno, se abbiamo rover completamente autonomi, possono considerare tutte queste cose per sapere dove possono andare, ed essere in grado di adattarsi a situazioni impreviste, " Dice Pankratius. "Vuoi autonomia, altrimenti può volerci molto tempo per comunicare avanti e indietro quando devi prendere rapidamente decisioni critiche."
Il team sta anche esaminando le applicazioni delle tecniche nell'esplorazione di siti geotermici sulla Terra in collaborazione con il MIT Earth Resources Lab nel Dipartimento della Terra, Scienze dell'atmosfera e planetarie.
"È un problema molto simile, " Dice Pankratius. "Invece di dire 'È un buon sito, sì o no?' si può dire, 'Mostrami una mappa di tutte le aree che potrebbero essere praticabili per l'esplorazione geotermica.'"
Man mano che i dati migliorano, sia per Marte che per le strutture geotermiche sulla Terra, dice che quei dati possono essere inseriti nel programma esistente per fornire analisi più accurate.
"Il programma è potenziabile in modo incrementale, " lui dice.
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.