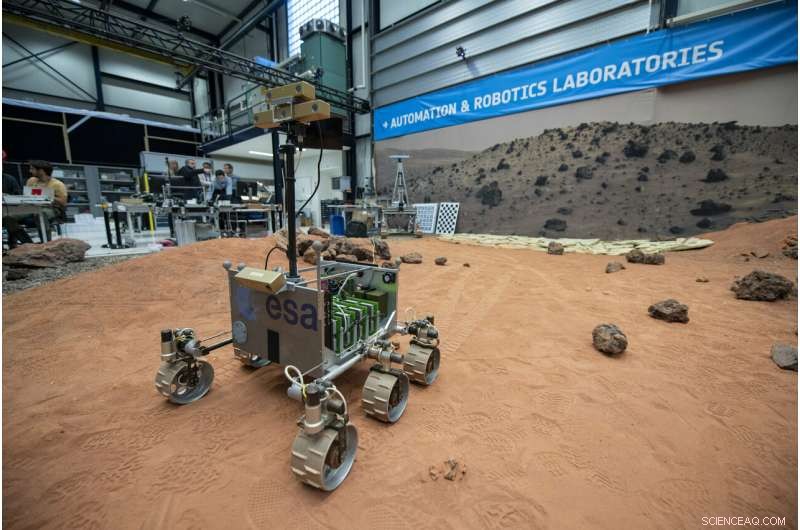
Una versione in scala ridotta del rover ExoMars, chiamato ExoMars Testing Rover (ExoTeR), visto manovrarsi con attenzione attraverso le rocce rosse e la sabbia di 9x9 m Planetary Utilization Testbed, parte del Planetary Robotics Laboratory dell'ESA nel suo centro tecnico ESTEC nei Paesi Bassi, come test del software di navigazione autonomo destinato alla missione ExoMars 2020 dell'ESA sul Pianeta Rosso. Credito:ESA–G. Facchino, CC BY-SA 3.0 IGO
Il software di navigazione destinato alla missione ExoMars 2020 sul Pianeta Rosso ha superato un test di guida su rover presso il "Mars Yard" dell'ESA.
Il rover ExoMars dell'ESA si dirigerà verso più posizioni e perforerà fino a due metri sotto la superficie di Marte alla ricerca di indizi per la vita passata conservata nel sottosuolo.
Una versione in scala ridotta del rover ExoMars, chiamato ExoMars Testing Rover (ExoTeR), si è manovrato con attenzione attraverso le rocce rosse e la sabbia del 'Planetary Utilization Testbed' di 9 x 9 m, soprannominato il cantiere di Marte, parte del Planetary Robotics Laboratory dell'ESA presso ESTEC nei Paesi Bassi.
Calcolando attentamente il suo percorso di andata, ExoTeR è progredito a una velocità di 2 m al minuto, ancora molte volte più veloce di quanto guiderà il rover ExoMars effettivo, che progredirà a 100 m per giorno marziano.
Il test di due giorni del rover è stato condotto dagli ingegneri robotici dell'ESA, affiancato da un team dell'agenzia spaziale francese CNES a Tolosa. Hanno più di due decenni di esperienza nella navigazione autonoma per rover planetari, culminando nello sviluppo della suite di software "AutoNav" che stava facendo la guida.
Nel corso del 2017 ExoTeR è passato ad ALTEC in Italia, il sito del centro di monitoraggio e controllo del rover di ExoMars, per consentire alla squadra di controllo di allenarsi con il rover avanzato. In dicembre, il rover è tornato a ESTEC per un aggiornamento del suo algoritmo di navigazione autonomo.
Seguì il test di navigazione, confermando che il software funzionava bene. Il prossimo ExoTeR tornerà in Italia, consentendo al team di controllo ALTEC di acquisire esperienza lavorando con la funzionalità aggiuntiva della navigazione autonoma.
L'enorme distanza dalla Terra a Marte equivale a un ritardo del segnale compreso tra quattro e 24 minuti, rendendo impraticabile il controllo diretto di ExoMars. Invece il rover sarà in grado di prendere alcune delle sue decisioni.
"Piuttosto che inviare al rover traiettorie complete prive di rischi, la navigazione autonoma ci permette di inviargli solo un punto di destinazione, " spiega Luc Joudrier, ingegnere di robotica dell'ESA.
"Il rover crea una mappa digitale delle sue vicinanze e calcola il modo migliore per raggiungere quel punto target. Guardando la mappa cerca di posizionare il rover in tutte queste posizioni adiacenti per capire se il rover sarebbe al sicuro in ognuna di queste posizioni – o se le rocce sono troppo alte o il terreno troppo ripido.

Una versione in scala ridotta del rover ExoMars, chiamato ExoMars Testing Rover (ExoTeR), essere utilizzato per testare il software di navigazione autonomo sviluppato dal CNES nelle rocce rosse e nella sabbia del Planetary Utilization Testbed di 9x9 m, parte del Planetary Robotics Laboratory dell'ESA nel suo centro tecnico ESTEC nei Paesi Bassi. Credito:ESA–G. Facchino, CC BY-SA 3.0 IGO
"Lavorando dalla mappa di navigazione locale, il rover calcola il percorso sicuro verso l'obiettivo e inizia a muoversi lungo un segmento del percorso calcolato, alla fine del segmento ripete lo stesso processo di mappatura per progredire.
"È simile a un uomo che cammina. Guardiamo avanti per decidere dove stiamo andando ma mentre camminiamo scrutiamo i nostri piedi e se necessario cambiamo rotta per evitare ostacoli. Una volta scelto un percorso senza ostacoli, ci assicuriamo di seguire quel percorso per rimanere al sicuro".
Il rover ExoTeR, come il rover ExoMars stesso, è dotato di telecamere di navigazione stereo montate sull'albero per la mappatura digitale dell'elevazione. E mentre ruota in avanti, controlla costantemente i suoi progressi utilizzando un paio di telecamere nel suo telaio anteriore.
Questo rilevamento del movimento basato sulla visione funziona meglio della semplice misurazione del giro delle ruote del rover perché consente ai controller di tenere conto di qualsiasi slittamento delle ruote:i rover su Marte sono stati precedentemente catturati nella sabbia profonda, e continuare a girare la ruota potrebbe effettivamente scavare più a fondo.

Il rover ExoTeR, come il rover ExoMars stesso, è dotato di telecamere di navigazione stereo montate sull'albero per la mappatura digitale dell'elevazione. Credito:ESA–G. Facchino, CC BY-SA 3.0 IGO
Il rover ExoTeR, completo di software aggiornato, è ora pronto per tornare in ALTEC in Italia, consentendo al team di controllo di acquisire esperienza con la funzionalità aggiuntiva della navigazione autonoma prima del completamento del software di volo di ExoMars.
Il software di volo finale di ExoMars trasporterà effettivamente due set di software di navigazione autonomo, con un altro sviluppato da Airbus a Stevenage, UK.
"La combinazione dovrebbe dare al rover una maggiore flessibilità, " dice Luc. "L'idea è che si potrebbe ottenere prestazioni migliori su terreni più difficili, mentre l'altro potrebbe muoversi più velocemente lungo un terreno più facile."