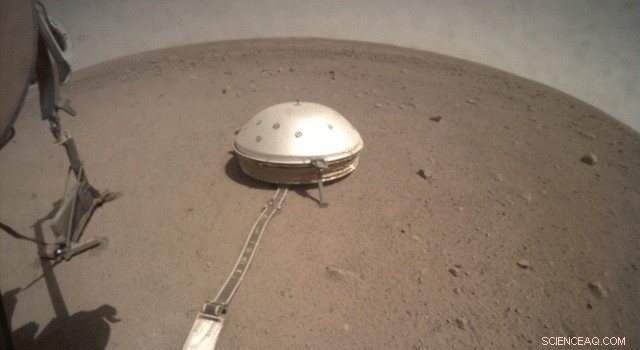
Il 28 giugno, 2019, Il lander InSight della NASA ha usato il suo braccio robotico per spostare la struttura di supporto per il suo strumento di scavo, informalmente chiamato "talpa". Questa vista è stata catturata dalla telecamera contestuale dello strumento fisheye sotto il ponte del lander. Credito:NASA/JPL-Caltech
Ecco la "talpa":il picco sensibile al calore che il lander InSight della NASA ha dispiegato sulla superficie marziana è ora visibile. La settimana scorsa, il braccio robotico della navicella ha rimosso con successo la struttura di supporto della talpa, che non ha saputo scavare, e lo mise da parte. Togliere di mezzo la struttura dà alla squadra della missione una visuale della talpa e forse un modo per aiutarla a scavare.
"Abbiamo completato il primo passo del nostro piano per salvare la talpa, " ha detto Troy Hudson di uno scienziato e ingegnere con la missione InSight presso il Jet Propulsion Laboratory della NASA a Pasadena, California. "Non abbiamo ancora finito. Ma per il momento, l'intero team è euforico perché siamo molto più vicini a far muovere di nuovo la talpa".
Parte di uno strumento chiamato Heat Flow and Physical Properties Package (HP3), la talpa auto-martellante è progettata per scavare fino a 16 piedi (5 metri) e misurare la temperatura di Marte. Ma la talpa non è stata in grado di scavare più a fondo di circa 12 pollici (30 centimetri), così il 28 febbraio, Nel 2019 il team ha ordinato allo strumento di smettere di martellare in modo da poter determinare un percorso da seguire.
Scienziati e ingegneri hanno condotto test per salvare la talpa al JPL, che guida la missione InSight, così come presso il Centro aerospaziale tedesco (DLR), che ha fornito HP3. Sulla base dei test DLR, il terreno potrebbe non fornire il tipo di attrito per cui è stata progettata la talpa. Senza attrito per bilanciare il rinculo dal movimento auto-martellante, la talpa rimbalzerebbe semplicemente sul posto piuttosto che scavare.
Un segno di questo tipo di terreno inaspettato è evidente nelle immagini scattate da una telecamera sul braccio robotico:una piccola fossa si è formata attorno alla talpa mentre martellava sul posto.
"Le immagini di ritorno da Marte confermano ciò che abbiamo visto nei nostri test qui sulla Terra, ", ha affermato Mattias Grott, scienziato del progetto HP3, di DLR. "I nostri calcoli erano corretti:questo terreno coeso si sta compattando nelle pareti mentre la talpa martella".
La squadra vuole premere sul terreno vicino a questa fossa usando una piccola paletta all'estremità del braccio robotico. La speranza è che questo possa far crollare la fossa e fornire l'attrito necessario affinché la talpa possa scavare.
È anche possibile che la talpa abbia colpito una roccia. Mentre la talpa è progettata per spingere via piccole rocce o deviarle intorno, quelli più grandi impediranno l'avanzamento del picco. Ecco perché la missione ha selezionato con cura un sito di atterraggio che avrebbe probabilmente sia meno rocce in generale che più piccole vicino alla superficie.
Il rampino del braccio robotico non è progettato per sollevare la talpa una volta che è fuori dalla sua struttura di supporto, quindi non sarà in grado di spostare la talpa se una roccia la blocca.
Il team discuterà i prossimi passi da intraprendere sulla base di un'attenta analisi. Dopo questo mese, dopo aver liberato il rampino del braccio dalla struttura di supporto, porteranno una macchina fotografica per alcune immagini dettagliate della talpa.