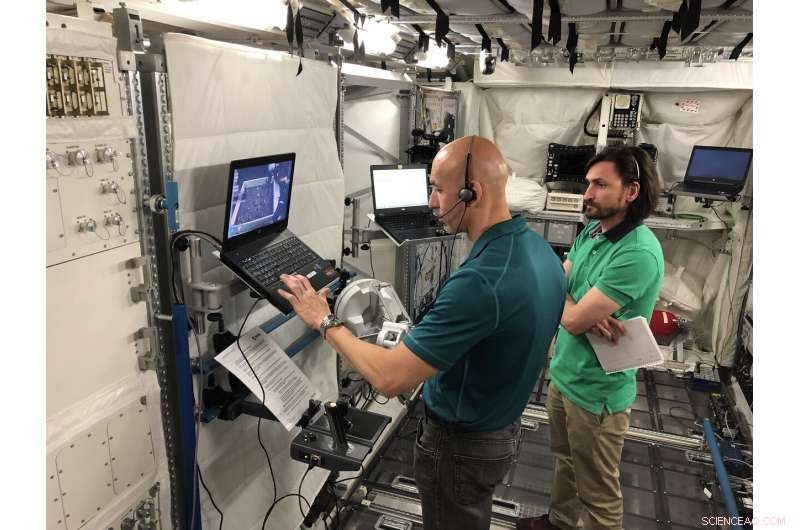
L'astronauta dell'ESA Luca Parmitano si prepara per le operazioni sperimentali ANALOG-1 a terra nel Centro Astronauti Europeo di Colonia, Germania. L'indagine gli richiederà di controllare a distanza un rover terrestre dalla stazione spaziale. Credito:ESA
Gli astronauti potrebbero un giorno controllare a distanza i rover lunari e marziani dall'orbita. Un prossimo test a bordo della Stazione Spaziale Internazionale potrebbe aiutare a rendere questa possibilità. A novembre, l'ESA (Agenzia Spaziale Europea) condurrà un esperimento in orbita noto come ANALOG-1 per vedere se gli equipaggi della stazione, scienziati a terra e nuove tecnologie possono lavorare insieme per guidare un rover in una missione lunare simulata.
Questo progetto indaga sull'efficacia con cui un astronauta sulla Stazione Spaziale Internazionale può far funzionare un rover su un terreno simile alla Luna sulla Terra. Il rover ha il compito di raccogliere campioni di roccia e suolo, quindi investigare a distanza i campioni.
"Questo è un potenziale scenario scientifico durante le future missioni sulla Luna e su Marte, " ha detto William Carey, Scienziato dell'ESA e ricercatore principale per l'esperimento ANALOG-1. "Lo spazio è un luogo così duro per gli esseri umani e le macchine. La futura esplorazione del sistema solare potrebbe comportare l'invio di esploratori robotici per testare le acque su pianeti inesplorati prima di inviare gli umani".
Chiudi da remoto
ANALOG-1 è la fase finale del progetto METERON (Multi-purpose End To End Robotics Operations Network) in corso dell'ESA, che è un'iniziativa per sviluppare e testare la robotica, comunicazioni e innovazioni operative che gli astronauti potrebbero utilizzare per esplorare il sistema solare.
Storicamente, i rover che esplorano altri pianeti sono stati controllati con software preprogrammati e da scienziati che inviano comandi dalla Terra che impiegano lunghi periodi di tempo per raggiungere i robot. Questi approcci hanno funzionato abbastanza bene da far avanzare notevolmente la nostra conoscenza di altri mondi, ma possono rendere difficile lavorare velocemente, cambiare i piani o adattarsi rapidamente a situazioni impreviste.
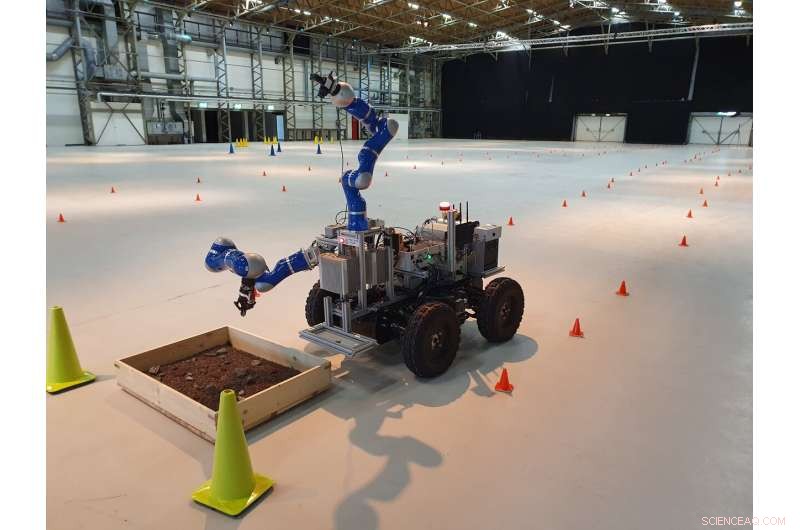
Il rover ANALOG-1 Interact situato vicino al Centro europeo di ricerca e tecnologia spaziale nei Paesi Bassi è controllato da un astronauta surrogato con sede presso il Centro astronauti europeo in Germania. I coni indicano un percorso che il rover deve seguire per raggiungere il sito campione. Credito:ESA
Carey e il suo team dell'ESA sospettano che un metodo migliore potrebbe essere quello di posizionare gli astronauti in orbita attorno ai siti di esplorazione dove potrebbero comunicare rapidamente con il rover. Con un astronauta vicino ai comandi del rover, gli scienziati potrebbero esplorare in modo più efficiente un obiettivo pianificato, sfruttare un'opportunità a sorpresa o gestire rapidamente un problema.
"Un certo numero di agenzie spaziali ha esaminato un tale scenario per l'esplorazione di corpi planetari, in particolare per Marte, " ha detto Carey. "L'approccio potrebbe aumentare notevolmente il ritorno scientifico su quelle missioni, oltre a offrire un modo per evitare la potenziale contaminazione da parte degli umani che atterrano sulla superficie prima di poter rispondere a domande sulla vita esistente o precedente su Marte".
I risultati dell'esperimento potrebbero essere di particolare valore per la NASA mentre si prepara ad esplorare la Luna dalla prevista astronave Gateway come parte del programma Artemis, dove la NASA andrà avanti verso la Luna e su Marte.
A portata di mano
Durante l'esperimento di due ore, L'astronauta dell'ESA Luca Parmitano utilizzerà una workstation a bordo del laboratorio orbitante per tentare di comandare un rover controllabile a distanza e il suo braccio mentre attraversa una superficie simile alla Luna vicino a Noordwijk, una città dei Paesi Bassi. Parmitano guiderà il robot utilizzando un sistema informatico specializzato e sarà guidato da scienziati che comunicano con lui a terra. Utilizzerà anche un "joystick" Sigma 7 all'avanguardia che consentirà all'astronauta di percepire ciò che incontra il braccio del rover.
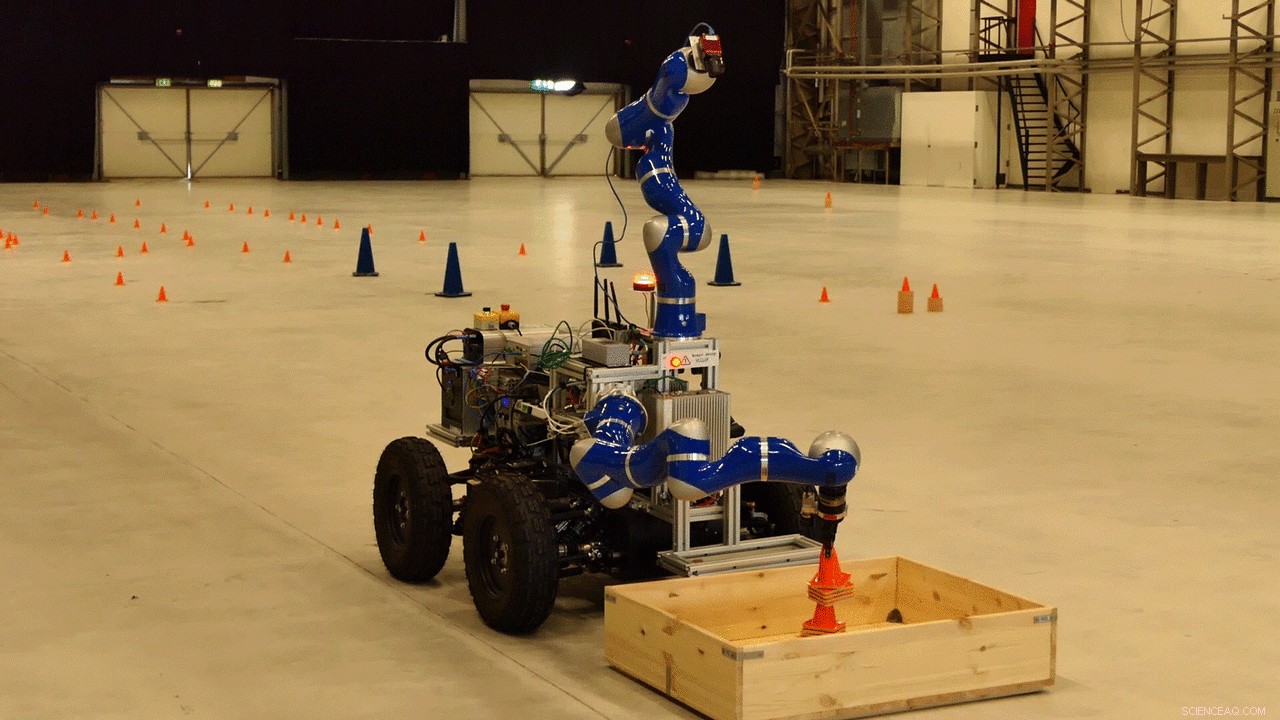
Il rover che verrà utilizzato come parte dell'esperimento ESA ANALOG-1 sposta i coni all'interno della scatola del campione che conterrà le rocce durante l'esperimento. Crediti:ESA
"Il feedback di forza consente all'operatore di sentire ciò che sente il robot, ", ha affermato l'ingegnere capo della robotica dell'ESA Thomas Krueger. "Ad esempio, se il robot tocca un oggetto fragile, misura e trasmette informazioni all'utente, che poi ne sente la delicatezza sul joystick Sigma 7. Possono quindi azionare il braccio con maggiore attenzione rispetto a un normale joystick".
Parmitano utilizzerà il joystick per dirigere il braccio del robot per prelevare campioni di roccia e terra sulla Terra. Gli scienziati si aspettano che possa incontrare ulteriori difficoltà a causa del modo in cui il corpo umano risponde allo spazio. La ricerca ha dimostrato che la microgravità può compromettere il senso del tatto o del tatto di un astronauta, così come la capacità di tracciare oggetti in movimento, entrambi elementi fondamentali nel compito di questa indagine.
Valutare il compito da svolgere
Quando l'esperimento è finito, i ricercatori sul campo valuteranno il buon funzionamento dei sistemi di controllo robotico ed esamineranno la capacità di Parmitano di far funzionare il rover sotto gli effetti della microgravità. Osserveranno anche come Parmitano e il team scientifico sulla Terra siano stati in grado di comunicare per prendere decisioni e piani per controllare il rover.
"I robot hanno la capacità di estendere la nostra presenza su altri mondi e aumentare la nostra efficienza di esplorazione, " ha affermato il project manager dell'ESA Kjetil Wormnes. "I risultati di ANALOG-1 ci aiuteranno a determinare il modo più efficace per collaborare con i robot per prepararci alla nostra futura esplorazione della Luna".