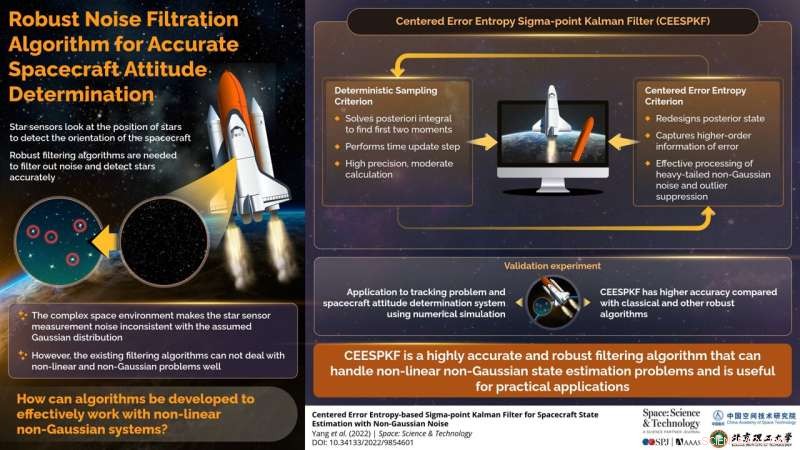
Infografica per filtro kalman sigma-point basato sull'entropia dell'errore centrato per la stima dello stato di veicoli spaziali con rumore non gaussiano. Credito:Spazio:scienza e tecnologia
Un modello cinematico dell'assetto del veicolo spaziale, un modello di misurazione dell'assetto e un algoritmo di filtro sono tre parti importanti nella determinazione dell'assetto del veicolo spaziale e un algoritmo di filtraggio ad alta precisione è la chiave per determinare l'assetto. Il classico filtro di Kalman sigma-point (SPKF) è ampiamente utilizzato in un'area di stima dello stato di un veicolo spaziale con l'ipotesi del rumore bianco gaussiano.
Sebbene l'algoritmo SPKF funzioni bene con un rumore bianco gaussiano ideale, le effettive condizioni operative del veicolo spaziale in orbita sono complicate. L'interferenza ambientale spaziale, il jitter del pannello solare e il rumore di sfarfallio faranno sì che il rumore non soddisfi più la distribuzione gaussiana e presenterà una situazione non gaussiana a coda pesante, in cui il metodo di filtraggio SPKF classico non è più applicabile e si verificherà un evidente degrado della precisione o addirittura filtrare la divergenza.
In un documento di ricerca recentemente pubblicato su Spazio:scienza e tecnologia , un team congiunto dell'Università di ingegneria dell'esercito del PLA e dell'Accademia cinese di scienze militari, ha proposto un solido algoritmo Centered Error Entropy Unscented Kalman Filter (CEEUKF) combinando il criterio di campionamento deterministico con il criterio dell'entropia dell'errore centrato.
Innanzitutto, l'autore ha introdotto il classico algoritmo SPKF e il criterio CEE. Il filtro di Kalman (KF) è il filtro ottimale con il framework gaussiano lineare. Tuttavia, i sistemi effettivi sono spesso sistemi non lineari e non esiste un algoritmo di filtraggio ottimale per i sistemi non lineari. Solo metodi approssimati possono essere utilizzati per i sistemi gaussiani non lineari.
L'algoritmo di filtraggio non lineare basato sul criterio di campionamento deterministico ha una precisione maggiore rispetto alla linearizzazione della funzione non lineare. I classici metodi di filtraggio gaussiano non lineare di campionamento deterministico sono il filtro Kalman non profumato (UKF), il filtro Kalman cubature (CKF) e il filtro Kalman differenziale centrale (CDKF). Poiché questi metodi implicano il campionamento di punti deterministici, l'autore li ha chiamati metodi SPKF.
Inoltre, è stato utilizzato il tipico metodo UT e l'UKF è stato rivisto. L'UKF classico ha utilizzato il metodo UT per ottenere punti di campionamento e approssimare la media dello stato e la covarianza dell'errore di una funzione di densità di probabilità (PDF). Il metodo UKF era più facile per approssimare il PDF rispetto a una funzione non lineare. La fase di aggiornamento del tempo e la fase di aggiornamento della misurazione erano contenute in esso.
Successivamente, l'autore ha preso la combinazione ponderata della correntropia massima (MC) e dell'entropia dell'errore minimo (MEE) come espressione di CEE, che era stata verificata essere più robusta dei criteri MEE e MC.
Quindi, l'autore ha derivato l'UKF basato sull'entropia dell'errore centrato (CEEUKF) dal criterio CEE e si è impegnato ad estendere questo algoritmo a campi non lineari e non gaussiani. Il CEEUKF conteneva fasi di aggiornamento del tempo e delle misurazioni. Per il sistema non lineare, l'aggiornamento temporale dell'algoritmo CEEUKF era lo stesso del classico algoritmo UKF, in cui i metodi di campionamento del punto sigma sono stati utilizzati per eseguire la fase di aggiornamento temporale.
La nuova fase di aggiornamento delle misure è stata progettata sulla base di due lavori principali. Uno è l'istituzione del modello aumentato e l'altro è la stima dello stato a posteriori secondo il criterio CEE. Poiché le informazioni di ordine superiore dell'errore sono state acquisite dal criterio CEE, i CEESPKF dovrebbero essere più robusti per gestire il rumore non gaussiano rispetto al CEEKF.
Successivamente, l'applicazione al sistema di determinazione dell'assetto del veicolo spaziale ha verificato la teoria dell'autore. L'autore ha introdotto per la prima volta il modello giroscopico, il modello del sistema di determinazione dell'assetto e il modello di misurazione. Quindi, per eseguire la simulazione, sono stati utilizzati l'UKF classico, il filtro di Kalman non profumato di correlazione massima (MCUKF) e il filtro di Kalman non profumato di errorentropia minimo (MEEUKF) e il CEEUKF proposto.
Nel rumore gaussiano, la precisione di filtraggio di CEEUKF e MCUKF era vicina a quella del metodo UKF classico. La precisione di filtraggio di MEEUKF era scarsa a causa della sua instabilità. Nel rumore non gaussiano, l'algoritmo CEEUKF proposto aveva la massima precisione di filtraggio rispetto al classico UKF e altri algoritmi robusti.
Inoltre, il CEEUKF ha avuto anche il tasso di convergenza più veloce. I risultati di filtraggio dell'UKF tradizionale avevano l'accuratezza di filtraggio più bassa e alcuni grandi errori stimati si sono verificati in momenti diversi. L'MCUKF ha avuto un effetto di filtraggio migliore rispetto all'UKF tradizionale, ma era più povero del CEEUKF proposto. In conclusione, rispetto agli algoritmi esistenti, CEEUKF ha mostrato le sue eccellenti prestazioni con la corretta scelta delle larghezze di banda del kernel nella simulazione del sistema di stima dell'assetto del veicolo spaziale. + Esplora ulteriormente