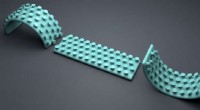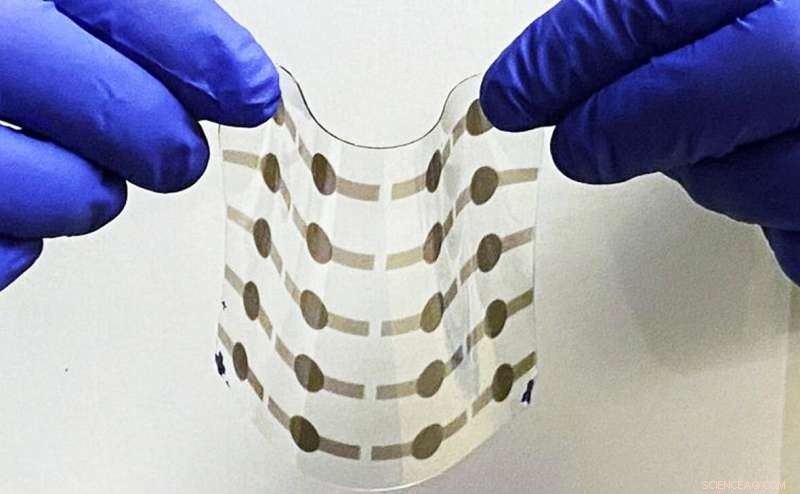
Una pellicola da 4x5 pollici composta da 10 strati di elastomeri dielettrici (PHDE) lavorabili e ad alte prestazioni impilati insieme a 20 attuatori. Credito:Laboratorio di ricerca sui materiali morbidi/UCLA
Gli scienziati dei materiali dell'UCLA e i colleghi dell'istituto di ricerca scientifica senza scopo di lucro SRI International hanno sviluppato un nuovo materiale e un nuovo processo di produzione per creare muscoli artificiali che sono più forti e flessibili delle loro controparti biologiche.
"Creare un muscolo artificiale per consentire il lavoro e rilevare la forza e il tatto è stata una delle grandi sfide della scienza e dell'ingegneria", ha affermato Qibin Pei, professore di scienze dei materiali e ingegneria presso la UCLA Samueli School of Engineering e corrispondente autore di un studio recentemente pubblicato su Scienza .
Affinché un materiale morbido possa essere considerato per l'uso come muscolo artificiale, deve essere in grado di produrre energia meccanica e rimanere vitale in condizioni di elevata sollecitazione, il che significa che non perde facilmente forma e forza dopo cicli di lavoro ripetuti. Sebbene molti materiali siano stati considerati contendenti per la realizzazione di muscoli artificiali, gli elastomeri dielettrici (DE) - materiali leggeri con un'elevata densità di energia elastica - sono stati di particolare interesse per la loro flessibilità e tenacità ottimali.
Gli elastomeri dielettrici sono polimeri elettroattivi, che sono sostanze naturali o sintetiche composte da grandi molecole che possono cambiare dimensione o forma quando stimolate da un campo elettrico. Possono essere utilizzati come attuatori, consentendo alle macchine di funzionare trasformando l'energia elettrica in lavoro meccanico.
La maggior parte degli elastomeri dielettrici sono realizzati in acrilico o silicone, ma entrambi i materiali presentano degli inconvenienti. Sebbene i tradizionali DE acrilici possano ottenere un'elevata sollecitazione di attuazione, richiedono pre-stiramento e mancano di flessibilità. I siliconi sono più facili da realizzare, ma non possono resistere a sollecitazioni elevate.
Utilizzando sostanze chimiche disponibili in commercio e impiegando un processo di polimerizzazione con luce ultravioletta (UV), il team di ricerca guidato dall'UCLA ha creato un materiale a base acrilica migliorato che è più flessibile, regolabile e più semplice da scalare senza perdere la sua forza e resistenza. Mentre l'acido acrilico consente la formazione di più legami idrogeno, rendendo così il materiale più mobile, i ricercatori hanno anche regolato la reticolazione tra le catene polimeriche, consentendo agli elastomeri di essere più morbidi e flessibili. Il risultante film di elastomero dielettrico sottile, lavorabile e ad alte prestazioni, o PHDE, viene quindi inserito tra due elettrodi per convertire l'energia elettrica in movimento come attuatore.
Ogni pellicola PHDE è sottile e leggera come un capello umano, circa 35 micrometri di spessore, e quando più strati sono impilati insieme, diventano un motore elettrico in miniatura che può agire come tessuto muscolare e produrre energia sufficiente per alimentare il movimento per piccoli robot o sensori. I ricercatori hanno realizzato pile di film PHDE che variano da quattro a 50 strati.
"Questo attuatore flessibile, versatile ed efficiente potrebbe aprire le porte ai muscoli artificiali nelle nuove generazioni di robot, o nei sensori e nella tecnologia indossabile che possono imitare in modo più accurato o addirittura migliorare il movimento e le capacità umane", ha affermato Pei.
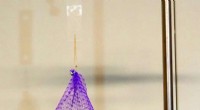
Un robot che salta, di circa 1,2 centimetri di diametro, dotato di attuatori PHDE. Credito:Laboratorio di ricerca sui materiali morbidi/UCLA
Artificial muscles fitted with PHDE actuators can generate more megapascals of force than biological muscles and they also demonstrate three to 10 times more flexibility than natural muscles.
Multilayered soft films are usually manufactured via a "wet" process that involves depositing and curing liquid resin. But that process can result in uneven layers, which make for a poor- performing actuator. For this reason, up to now, many actuators have only been successful with single-layer DE films.
The UCLA research involves a "dry" process by which the films are layered using a blade and then UV-cured to harden, making the layers uniform. This increases the actuator's energy output so that the device can support more complex movements.
The simplified process, along with the flexible and durable nature of the PHDE, allows for the manufacture of new soft actuators capable of bending to jump, like spider legs, or winding up and spinning. The researchers also demonstrated the PHDE actuator's ability to toss a pea-sized ball 20 times heavier than the PHDE films. The actuator can also expand and contract like a diaphragm when a voltage is switched on and off, giving a glimpse of how artificial muscles could be used in the future.
The advance could lead to soft robots with improved mobility and endurance, and new wearable and haptic technologies with a sense of touch. The manufacturing process could also be applied to other soft thin-film materials for applications including microfluidic technologies, tissue engineering or microfabrication. + Esplora ulteriormente