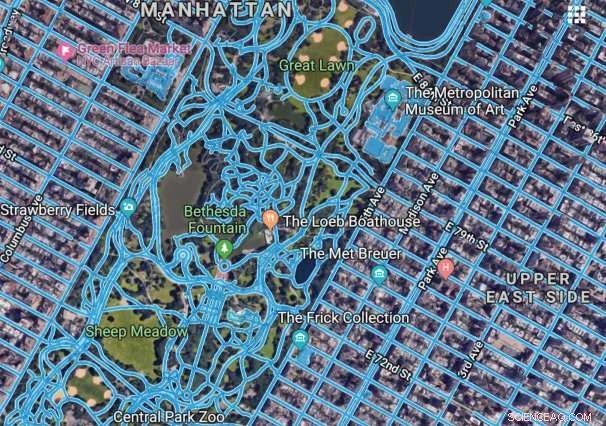
Per creare mappe stradali complete, le aziende come Google devono spesso chiedere ai dipendenti di acquisire immagini aeree esistenti con informazioni incomplete e riempire manualmente le lacune. Credito:Massachusetts Institute of Technology
Le app di mappe potrebbero aver cambiato il nostro mondo, ma non hanno ancora mappato tutto. Nello specifico, mappare le strade può essere difficile e noioso:anche dopo aver scattato immagini aeree, le aziende devono ancora passare molte ore a tracciare manualmente le strade. Di conseguenza, anche aziende come Google non sono ancora riuscite a mappare la stragrande maggioranza degli oltre 20 milioni di miglia di strade in tutto il mondo.
Le lacune nelle mappe sono un problema, in particolare per i sistemi in fase di sviluppo per auto a guida autonoma. Per affrontare il problema, ricercatori del Computer Science and Artificial Intelligence Laboratory (CSAIL) del MIT hanno creato RoadTracer, un metodo automatizzato per creare mappe stradali che è il 45% più accurato degli approcci esistenti.
Utilizzando i dati delle immagini aeree, il team afferma che RoadTracer non è solo più preciso, ma più conveniente rispetto agli approcci attuali. Il professore del MIT Mohammad Alizadeh afferma che questo lavoro sarà utile sia per i giganti della tecnologia come Google sia per le organizzazioni più piccole senza le risorse per curare e correggere grandi quantità di errori nelle mappe.
"RoadTracer è adatto per mappare aree del mondo in cui le mappe sono spesso obsolete, che include sia i luoghi con meno popolazione sia le aree dove ci sono frequenti costruzioni, "dice Alizadeh, uno dei coautori di un nuovo articolo sul sistema. "Per esempio, le mappe esistenti per aree remote come la Thailandia rurale mancano di molte strade. RoadTracer potrebbe contribuire a renderli più precisi."
Per esempio, guardando le immagini aeree di New York City, RoadTracer potrebbe mappare correttamente il 44% dei suoi incroci stradali, che è più del doppio più efficace degli approcci tradizionali basati sulla segmentazione dell'immagine che potrebbero mappare solo il 19%.
La carta, che sarà presentato a giugno alla Conferenza su Computer Vision and Pattern Recognition (CVPR) a Salt Lake City, Utah, è una collaborazione tra CSAIL e Qatar Computing Research Institute (QCRI).
I coautori del MIT di Alizadeh includono gli studenti laureati Fayven Bastani e Songtao He, e professori Hari Balakrishnan, Sam Madden, e David DeWitt. I coautori di QCRI includono l'ingegnere software senior Sofiane Abbar e Sanjay Chawla, chi è il direttore della ricerca del Data Analytics Group di QCRI.
Gli sforzi attuali per automatizzare le mappe comportano l'addestramento delle reti neurali per guardare le immagini aeree e identificare i singoli pixel come "stradali" o "non stradali". Poiché le immagini aeree possono essere spesso ambigue e incomplete, tali sistemi richiedono anche una fase di post-elaborazione che ha lo scopo di cercare di colmare alcune lacune.
Sfortunatamente, questi cosiddetti approcci di "segmentazione" sono spesso imprecisi:se il modello etichetta erroneamente un pixel, quell'errore verrà amplificato nella road map finale. Gli errori sono particolarmente probabili se le immagini aeree hanno alberi, edifici, o ombre che oscurano dove iniziano e finiscono le strade. (La fase di post-elaborazione richiede anche di prendere decisioni basate su ipotesi che potrebbero non sempre reggere, come collegare due segmenti di strada semplicemente perché sono uno accanto all'altro.)
Nel frattempo, RoadTracer crea mappe passo dopo passo. Inizia in una posizione nota sulla rete stradale, e utilizza una rete neurale per esaminare l'area circostante per determinare quale punto è più probabile che sia la parte successiva della strada. Quindi aggiunge quel punto e ripete il processo per tracciare gradualmente la rete stradale un passo alla volta.
"Piuttosto che prendere migliaia di decisioni diverse contemporaneamente sul fatto che i vari pixel rappresentino parti di una strada, RoadTracer si concentra sul problema più semplice di capire quale direzione seguire quando si parte da un punto particolare che sappiamo essere una strada, " dice Bastani. "Questo è per molti versi in realtà molto più vicino a come noi come esseri umani costruiamo modelli mentali del mondo che ci circonda".
Il team ha addestrato RoadTracer su immagini aeree di 25 città in sei paesi del Nord America e dell'Europa, e poi ha valutato le sue capacità di mappatura su altre 15 città.
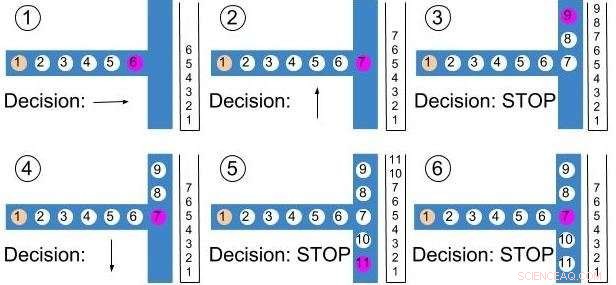
Per creare una mappa stradale, il sistema inizia in una posizione nota e utilizza una rete neurale per esaminare l'area circostante per determinare quale punto è più probabile che sia la parte successiva della strada. Quindi aggiunge quel punto e ripete il processo per tracciare gradualmente la strada un passo alla volta. Credito:Massachusetts Institute of Technology
"È importante che un sistema di mappatura sia in grado di funzionare bene su città su cui non si è formato, perché le regioni in cui la mappatura automatica è più promettente sono quelle in cui le mappe esistenti sono inesistenti o imprecise, "dice Balakrishnan.
Bastani afferma che il fatto che RoadTracer abbia avuto un tasso di errore inferiore del 45% è essenziale per rendere più pratici i sistemi di mappatura automatica per aziende come Google.
"Se il tasso di errore è troppo alto, quindi è più efficiente mappare le strade manualmente da zero rispetto alla rimozione di segmenti errati dalla mappa dedotta, "dice Bastani.
Ancora, l'implementazione di qualcosa come RoadTracer non porterebbe le persone completamente fuori dal giro:il team afferma che potrebbero immaginare il sistema che propone mappe stradali per una vasta regione e poi fa entrare un esperto umano per ricontrollare il progetto.
"Detto ciò, ciò che è chiaro è che con un sistema come il nostro potresti ridurre drasticamente la quantità di lavoro noioso che gli umani dovrebbero fare, " dice Alizade.
Infatti, un vantaggio dell'approccio incrementale di RoadTracer è che rende molto più facile correggere gli errori; i supervisori umani possono semplicemente correggerli e rieseguire l'algoritmo da dove avevano interrotto, piuttosto che continuare a utilizzare informazioni imprecise che si riversano in altre parti della mappa.
Certo, le immagini aeree sono solo un pezzo del puzzle. Non ti danno informazioni su strade che hanno cavalcavia e sottopassi, poiché questi sono impossibili da accertare dall'alto. Di conseguenza, il team sta anche sviluppando separatamente algoritmi in grado di creare mappe dai dati GPS, e lavorando per unire questi approcci in un unico sistema per la mappatura.
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.