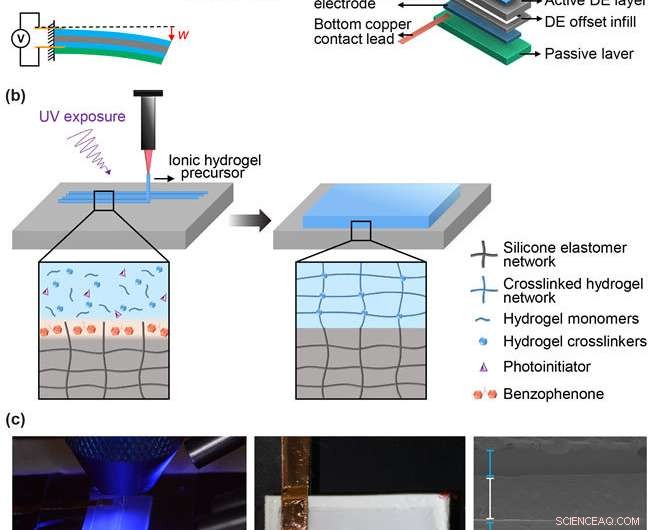
(a) Schema di un dispositivo attuatore morbido (a sinistra) e vista esplosa del dispositivo e degli strati di materiale costituente (a destra). (b) Schema del deposito di idrogel (stampa 3D) sulla superficie di uno strato di silicone dopo il trattamento superficiale e sotto l'esposizione alla luce UV. (c) Stampa dell'idrogel ionico sullo strato passivo dopo il trattamento superficiale (a sinistra), DEA finale stampata in 3D (al centro), e immagine della microstruttura della sezione trasversale del dispositivo (a destra). Credito:Esercito degli Stati Uniti
Per superare la rigidità del materiale e i limiti di attuazione negli attuali sistemi robotici, un progetto di ricerca congiunto dell'US Army Research Laboratory e dell'Università del Minnesota ha cercato ispirazione dagli invertebrati.
L'esercito degli Stati Uniti utilizza robot strutturalmente rigidi, rendendoli impraticabili durante l'esecuzione di operazioni militari in ambienti urbani altamente congestionati e contesi, dove le manovre segrete sono fondamentali per ottenere la superiorità militare.
"Il successo delle manovre furtive richiede un'elevata flessibilità strutturale e un controllo distributivo per intrufolarsi in spazi ristretti o ristretti, operare per lunghi periodi ed emulare morfologie biologiche e adattabilità, " ha detto il dottor Ed Habtour, Ricercatore ARL specializzato in dinamica strutturale non lineare.
Secondo Habtour, gli attuali robot militari hanno due principali limitazioni che impediscono loro di imitare la locomozione degli organismi biologici.
Primo, questi robot mancano della necessaria flessibilità dinamica, poiché sono per lo più assemblati con componenti meccanici ed elettronici rigidi.
Secondo, i robot rigidi richiedono meccanismi complessi e circuiti elettrici per ottenere un'attuazione attiva e modalità di movimento complesse.
Per superare questi limiti, un progetto di ricerca congiunto ARL e UMN ha cercato ispirazione dagli invertebrati.
Questo sforzo di ricerca ha portato alla creazione di prototipi di attuatori morbidi utilizzando materiali attivi con parametri notevolmente regolabili, come flessibilità strutturale, morfologia e attuazione dinamica.
Il prototipo è il primo attuatore in elastomero dielettrico completamente stampato in 3D, o DEA, che può eseguire un movimento di flessione elevato.
I DEA stampati in 3D hanno mostrato deviazioni significativamente maggiori, tre volte più di altri esempi recenti nella letteratura scientifica.
Questi risultati sono stati pubblicati in Lettere di meccanica estrema (EML) in un documento intitolato:"Attuatori morbidi ad azionamento elettrico stampati in 3D", 2018.
"Nella fase iniziale del progetto, il nostro team ha iniziato studiando nuovi metodi per emulare la locomozione degli invertebrati, che ha fornito approfondimenti fondamentali sui macchinari dei loro circuiti di attuazione distribuita morbida che consentono movimenti di flessione elevati senza supporto scheletrico, ", ha affermato il professor Michael McAlpine dell'UMN.

Il Dr. Ed Habtour lavora nella direzione della tecnologia dei veicoli del Laboratorio di ricerca dell'esercito americano, dove è specializzato in sistemi dinamici non lineari. Credito:foto dell'esercito americano di Conrad Johnson
Comprendere i meccanismi innati dell'attuazione distributiva osservati in natura ha aiutato il team a identificare gli importanti parametri che possono essere manipolati per svolgere nuove funzioni, come ottenere modalità di movimento altamente flessibili.
Secondo McAlpine, acquisire conoscenze scientifiche sull'importanza di questi parametri, era necessario prima costruire e testare un prototipo simile agli attuatori presenti in natura tramite una piattaforma di stampa 3D su misura, e quindi sviluppare un modello matematico unificato per studiare la sensibilità di ciascun parametro e prevedere i vari meccanismi di attuazione ottimale.
Circuiti di attuazione distribuiti stampati in 3D UMN che coinvolgono soft, materiali estensibili con proprietà meccaniche simili a organismi biologici come cefalopodi e vermi.
ARL ha creato un modello generalizzato utilizzando un approccio di formulazione energetica, che è stato fondamentale per identificare due importanti meccanismi per consentire un elevato movimento di flessione negli attuatori biologici morbidi:(i) sintonizzare le proprietà fisiche (meccaniche e geometriche) sfruttando l'interazione tra i materiali e le non linearità dinamiche per aumentare il movimento; e (ii) evidenziare l'accoppiamento elettromeccanico tra il campo elettrico e la rigidità strutturale non lineare attraverso i circuiti di attuazione distributiva.
"I risultati della ricerca rappresentano un importante trampolino di lancio per fornire a Solider una piattaforma di fabbricazione autonoma a forma libera:una stampante 3D di nuova generazione, che può stampare materiali e dispositivi funzionali - per generare attuatori morbidi e robot morbidi potenzialmente tetherless su richiesta, al volo e al momento del bisogno, "Habtour ha detto.
Habtour ha osservato che la ricerca suggerisce anche che gli attuatori morbidi possono essere i primi candidati per la produzione additiva autonoma sul campo di battaglia.
"A differenza degli attuali DEA stampati in 3D, il nuovo metodo di fabbricazione non richiede passaggi di post-elaborazione, come il montaggio, essiccazione o ricottura, " ha affermato l'autore principale Ghazaleh Haghiashtiani. "Con il nuovo metodo di stampa 3D, il Solider può sfruttare le proprietà di attuazione uniche dei soft DEA a livello di materiali fondamentali con risoluzione e complessità su microscala, con una minima esperienza precedente."
Per quanto riguarda i prossimi passi, Habtour ha affermato che l'intento è quello di sviluppare i principi sperimentali e teorici che governano l'interazione tra le interfacce interne e la cinetica delle interazioni nei sistemi tempo-varianti osservati negli organismi biologici, che assicurano la loro locomozione flessibile e resilienza.
"Le intriganti interazioni tra le proprietà micromeccaniche dei materiali e le varie non linearità possono fornire nuove opportunità scientifiche per emulare le interazioni simbiotiche nei sistemi biologici, " Habtour ha detto. "Se possiamo capire queste interazioni, quindi possiamo usare queste intuizioni per fabbricare strutture dinamiche e robot flessibili progettati per essere auto-consapevoli, auto-sensibili e in grado di regolare le loro morfologie e proprietà in tempo reale per adattarsi a una miriade di condizioni esterne e interne."
Con questo, Habtour ha affermato che le implicazioni consisteranno nello scoprire le dinamiche emergenti delle strutture viventi e nell'emularle, fabbricare in autonomia strutture e dispositivi funzionalmente complessi, e sfruttando nuove modalità di attuazione non realizzabili nei sistemi robotici e meccanici convenzionali.