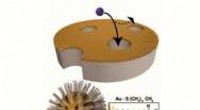
MIT Spiderlike Grabber (struttura esapedale) (Prima) Credito:Yoonho Kim &Xuanhe Zhao
Gli ingegneri del MIT hanno creato soft, Strutture stampate in 3D i cui movimenti possono essere controllati con l'onda di un magnete, proprio come le marionette senza le corde.
Il serraglio di strutture che possono essere manipolate magneticamente include un anello liscio che si arriccia, un lungo tubo che si chiude, un lenzuolo che si piega da solo, e un "afferratore" simile a un ragno che può strisciare, Rotolo, salto, e scatta insieme abbastanza velocemente da prendere una palla che passa. Può anche essere diretto ad avvolgersi attorno a una piccola pillola e portarlo su un tavolo.
I ricercatori hanno fabbricato ogni struttura da un nuovo tipo di inchiostro stampabile in 3D che hanno infuso con minuscole particelle magnetiche. Hanno montato un elettromagnete attorno all'ugello di una stampante 3D, che faceva oscillare le particelle magnetiche in un unico orientamento mentre l'inchiostro veniva alimentato attraverso l'ugello. Controllando l'orientamento magnetico delle singole sezioni nella struttura, i ricercatori possono produrre strutture e dispositivi che possono trasformarsi quasi istantaneamente in formazioni intricate, e anche muoversi, poiché le varie sezioni rispondono ad un campo magnetico esterno.
Xuanhe Zhao, il Noyce Career Development Professor presso il Dipartimento di Ingegneria Meccanica del MIT e il Dipartimento di Ingegneria Civile e Ambientale, afferma che la tecnica del gruppo può essere utilizzata per fabbricare dispositivi biomedici controllati magneticamente.
"Pensiamo che in biomedicina questa tecnica troverà applicazioni promettenti, " dice Zhao. "Per esempio, potremmo mettere una struttura attorno a un vaso sanguigno per controllare il pompaggio del sangue, o utilizzare un magnete per guidare un dispositivo attraverso il tratto gastrointestinale per acquisire immagini, estrarre campioni di tessuto, eliminare un blocco, o consegnare determinati farmaci in un luogo specifico. puoi progettare, simulare, e poi basta stampare per ottenere varie funzioni."
Zhao e i suoi colleghi hanno pubblicato oggi i loro risultati sulla rivista Natura . I suoi coautori includono Yoonho Kim, Hyunwoo Yuk, e Ruike Zhao del MIT, e Shawn Chester del New Jersey Institute of Technology.
Un campo mutevole
Le strutture attivate magneticamente del team rientrano nella categoria generale dei dispositivi ad azionamento morbido:morbidi, materiali modellabili progettati per cambiare forma o muoversi attraverso una varietà di mezzi meccanici. Ad esempio, i dispositivi idrogel si gonfiano quando la temperatura o il pH cambiano; i polimeri a memoria di forma e gli elastomeri a cristalli liquidi si deformano con stimoli sufficienti come calore o luce; i dispositivi pneumatici e idraulici possono essere azionati da aria o acqua pompata al loro interno; ed elastomeri dielettrici si allungano sotto tensioni elettriche.
Ma gli idrogel, polimeri a memoria di forma, e gli elastomeri a cristalli liquidi sono lenti a rispondere, e cambiare forma nel corso di minuti a ore. I dispositivi ad aria e ad acqua richiedono tubi che li colleghino alle pompe, rendendoli inefficienti per le applicazioni controllate a distanza. Gli elastomeri dielettrici richiedono alte tensioni, di solito sopra i mille volt.
"Non esiste un candidato ideale per un robot morbido in grado di esibirsi in uno spazio chiuso come un corpo umano, dove vorresti svolgere determinati compiti senza vincoli, " dice Kim. "Ecco perché pensiamo che ci sia una grande promessa in questa idea di attuazione magnetica, perché è veloce, forte, benigno del corpo, e può essere controllato a distanza."
Altri gruppi hanno fabbricato materiali attivati magneticamente, sebbene i movimenti che hanno ottenuto siano stati relativamente semplici. Per la maggior parte, ricercatori mescolano una soluzione polimerica con sfere magnetiche, e versare il composto in uno stampo. Una volta che il materiale si indurisce, applicano un campo magnetico per magnetizzare uniformemente le perline, prima di rimuovere la struttura dallo stampo.
"La gente ha fatto solo strutture che si allungano, restringersi, o piegare, " Yuk dice. "La sfida è, come si progetta una struttura o un robot in grado di svolgere compiti molto più complicati?"
Gioco di dominio
Invece di realizzare strutture con particelle magnetiche delle stesse, orientamento uniforme, il team ha cercato modi per creare "domini" magnetici:singole sezioni di una struttura, ciascuno con un distinto orientamento delle particelle magnetiche. Quando esposto a un campo magnetico esterno, ogni sezione dovrebbe muoversi in modo distinto, a seconda della direzione in cui le sue particelle si muovono in risposta al campo magnetico. In questo modo, il gruppo ha ipotizzato che le strutture dovessero svolgere articolazioni e movimenti più complessi.
Con la loro nuova piattaforma di stampa 3D, i ricercatori possono stampare sezioni, o domini, di una struttura, e sintonizzare l'orientamento delle particelle magnetiche in un particolare dominio cambiando la direzione dell'elettromagnete che circonda l'ugello della stampante, come viene stampato il dominio.
Il team ha anche sviluppato un modello fisico che prevede come una struttura stampata si deformerà sotto un campo magnetico. Data l'elasticità del materiale stampato, lo schema dei domini in una struttura, e il modo in cui viene applicato un campo magnetico esterno, il modello può prevedere il modo in cui una struttura complessiva si deformerà o si sposterà. Ruike ha scoperto che le previsioni del modello corrispondevano strettamente agli esperimenti che il team ha condotto con una serie di diverse strutture stampate.
MIT Spiderlike Grabber (struttura esapedale) (dopo) Credito:Yoonho Kim &Xuanhe Zhao
Oltre a un anello increspato, un tubo autoschiacciante, e un afferratore simile a un ragno, il team ha stampato altre strutture complesse, come un insieme di strutture "auxetiche" che si restringono o si espandono rapidamente lungo due direzioni. Zhao e i suoi colleghi hanno anche stampato un anello incastonato con circuiti elettrici e luci a LED rosse e verdi. A seconda dell'orientamento di un campo magnetico esterno, l'anello si deforma per illuminarsi di rosso o di verde, in maniera programmata.
"Abbiamo sviluppato una piattaforma di stampa e un modello predittivo da utilizzare per gli altri. Le persone possono progettare le proprie strutture e modelli di dominio, convalidarli con il modello, e stamparli per attivare varie funzioni, " dice Zhao. "Programmando complesse informazioni di struttura, dominio, e campo magnetico, si possono persino stampare macchine intelligenti come i robot."