Credito:Queensland University of Technology
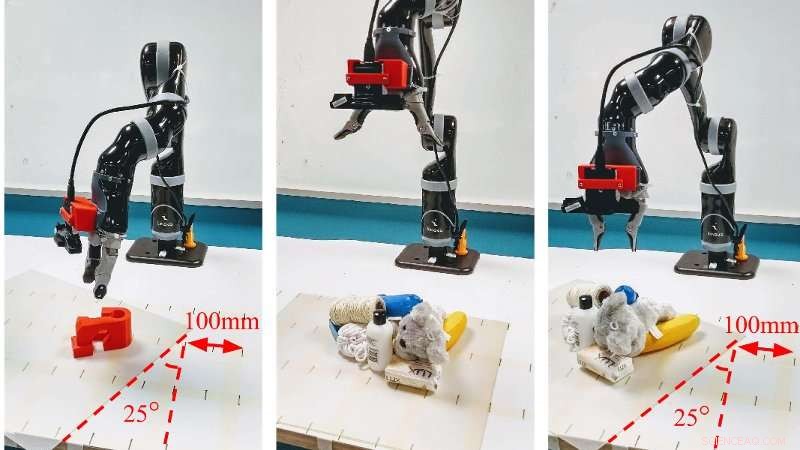
I robot di QUT hanno sviluppato un modo più rapido e preciso per consentire ai robot di afferrare oggetti, anche in ambienti disordinati e mutevoli, che ha il potenziale per migliorare la loro utilità sia in ambienti industriali che domestici.
Il Dr. Jürgen Leitner di QUT ha detto che mentre afferrare e raccogliere un oggetto era un compito fondamentale per gli umani, si era rivelato incredibilmente difficile per le macchine.
"Siamo stati in grado di programmare robot, in ambienti molto controllati, per raccogliere oggetti molto specifici. Però, uno dei principali difetti degli attuali sistemi di presa robotica è l'incapacità di adattarsi rapidamente al cambiamento, come quando un oggetto viene spostato, " ha detto il dottor Leitner.
"Il mondo non è prevedibile:le cose cambiano, si muovono e si confondono e, spesso, ciò avviene senza preavviso, quindi i robot devono essere in grado di adattarsi e lavorare in ambienti molto non strutturati se vogliamo che siano efficaci, " Egli ha detto.
Il nuovo metodo, sviluppato da Ph.D. ricercatore Douglas Morrison, Dr. Leitner e illustre Professor Peter Corke della Facoltà di Scienze e Ingegneria del QUT, è un tempo reale, metodo di sintesi della presa indipendente dall'oggetto per la presa a circuito chiuso.
"L'approccio Generative Grasping Convolutional Neural Network funziona prevedendo la qualità e la posa di una presa con due dita in ogni pixel. Mappando ciò che si trova di fronte utilizzando un'immagine di profondità in un unico passaggio, il robot non ha bisogno di campionare molte possibili prese prima di prendere una decisione, evitando lunghi tempi di calcolo, " ha detto il signor Morrison.
"Nei nostri test nel mondo reale, abbiamo ottenuto un tasso di successo di presa dell'83% su un insieme di oggetti inediti con geometria contraddittoria e dell'88% su un insieme di oggetti domestici che sono stati spostati durante il tentativo di presa. Raggiungiamo anche una precisione dell'81% quando si afferra in un disordine dinamico."
Il Dr. Leitner ha affermato che l'approccio ha superato una serie di limiti delle attuali tecniche di apprendimento profondo.
"Per esempio, nella sfida di raccolta di Amazon, che la nostra squadra ha vinto nel 2017, il nostro robot CartMan guarderebbe in un cestino di oggetti, prendere una decisione su dove fosse il posto migliore per afferrare un oggetto e poi entrare alla cieca per cercare di raccoglierlo, " Egli ha detto
"Utilizzando questo nuovo metodo, possiamo elaborare le immagini degli oggetti che un robot visualizza entro circa 20 millisecondi, che consente al robot di aggiornare la sua decisione su dove afferrare un oggetto e quindi farlo con uno scopo molto più grande. Ciò è particolarmente importante negli spazi ingombranti, " Egli ha detto.

Credito:Queensland University of Technology
Il Dr. Leitner ha affermato che i miglioramenti sarebbero preziosi per l'automazione industriale e negli ambienti domestici.
"Questa linea di ricerca ci consente di utilizzare sistemi robotici non solo in ambienti strutturati in cui l'intera fabbrica è costruita sulla base di capacità robotiche. Ci consente anche di afferrare oggetti in ambienti non strutturati, dove le cose non sono perfettamente pianificate e ordinate, e ai robot è richiesto di adattarsi al cambiamento.
"Ciò ha vantaggi per l'industria:dai magazzini per lo shopping online e lo smistamento, fino alla raccolta della frutta. Potrebbe essere applicato anche in casa, man mano che vengono sviluppati robot più intelligenti non solo per aspirare o pulire un pavimento, ma anche per raccogliere gli oggetti e metterli via."
Il documento del team Closing the Loop for Robotic Grasping:A Real-time, L'approccio di sintesi della presa generativa sarà presentato questa settimana a Robotics:Science and Systems, la più selettiva conferenza internazionale di robotica, che si tiene alla Carnegie Mellon University di Pittsburgh USA.