Il robot utilizzato in questo esperimento era una macchina del marchio Minitaur con le gambe. Attestazione:Georgia Tech / Neveln
Ehi, uno scarafaggio! Ma si stacca prima che appaia lo scacciamosche. Ora, i ricercatori hanno sfruttato le superbe capacità di corsa dell'insetto per creare un metodo intelligentemente semplice per valutare e migliorare la locomozione nei robot.
Normalmente, noiosa modellazione della meccanica, elettronica, e la scienza dell'informazione è necessaria per capire come le parti mobili degli insetti o dei robot si coordinano senza problemi per prendere il loro posto. Ma in un nuovo studio, I ricercatori di biomeccanica del Georgia Institute of Technology hanno ridotto gli sprint degli scarafaggi a pratici principi ed equazioni che hanno poi usato per far camminare meglio un robot di prova.
Il metodo ha spiegato ai ricercatori come ogni gamba opera da sola, come si uniscono nel loro insieme, e l'armonia o la mancanza di ciò nel modo in cui lo fanno. Nonostante le dinamiche di movimento completamente divergenti di bug e robot, il nuovo metodo ha funzionato per entrambi e dovrebbe funzionare per altri robot e animali, pure.
Il robot biologico, lo scarafaggio, era il corridore di gran lunga superiore con segnali neurologici che guidavano sei gambe impeccabilmente evolute. Il robot meccanico, un modello di consumo, aveva quattro gambe tozze e nessun sistema nervoso, ma faceva affidamento invece per il controllo della locomozione su forze fisiche grossolane che viaggiavano attraverso il suo telaio come segnali grezzi per coordinare approssimativamente la sua andatura goffa.
"Il robot era molto più ingombrante e riusciva a malapena a percepire l'ambiente circostante. Lo scarafaggio aveva molti sensi e può adattarsi meglio al terreno accidentato. Urti alti quanto i suoi fianchi non lo avrebbero rallentato affatto, " disse Izaak Neveln, il primo autore dello studio, che era un ricercatore post-dottorato nel laboratorio di Simon Sponberg presso la Georgia Tech durante lo studio.
Semplicità avanzata
Il metodo, o "misura, "come lo chiama lo studio, trasceso queste enormi differenze, che pervadono la robotica ispirata agli animali.
"La misura è generale (universale) nel senso che può essere utilizzata indipendentemente dal fatto che i segnali siano modelli di picchi neurali, cinematica, tensioni o forze e non dipende dalla particolare relazione tra i segnali, " hanno scritto gli autori dello studio.
Non importa come funzioni un bug o un bot, gli input e gli output matematici della misura sono sempre nelle stesse unità. La misura non eliminerà sempre la necessità di modellare, ma sta per abbreviare e guidare la modellazione e scongiurare passi falsi angosciosi.
Gli autori hanno pubblicato lo studio sulla rivista Comunicazioni sulla natura nell'agosto 2019. La ricerca è stata finanziata dalla National Science Foundation. Sponberg è un assistente professore alla School of Physics della Georgia Tech e alla School of Biological Sciences.
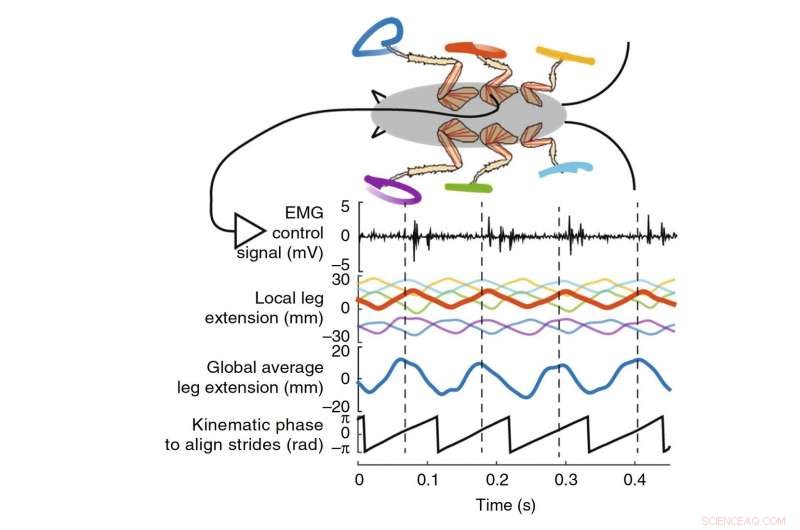
Le oscillazioni delle zampe dello scarafaggio possono essere rappresentate graficamente in modo simile alle oscillazioni di un pendolo in onde sinusoidali. Questi portano a una migliore comprensione matematica della locomozione dell'insetto. Attestazione:Georgia Tech / Sponberg / Neveln
Centralizzazione vs decentralizzazione
Spesso un robot o un animale invia molti segnali a piedi attraverso un sistema centrale per armonizzare la locomozione, ma non tutti i segnali sono centralizzati. Anche negli esseri umani, sebbene la locomozione dipenda fortemente dai segnali del sistema nervoso centrale, alcuni segnali neurali sono confinati a regioni del corpo; sono segnali localizzati.
Alcuni insetti sembrano muoversi con poca centralizzazione, come insetti stecco, detti anche bastoni da passeggio, le cui gambe si muovono quasi indipendentemente. Gli insetti del bastone sono corridori traballanti.
"L'idea era che gli insetti del bastone avessero il controllo del movimento più localizzato, considerando che uno scarafaggio va molto veloce e ha bisogno di mantenere la stabilità, e il suo controllo del movimento è probabilmente più centralizzato, più simile a un orologio, " ha detto Nevel.
Una forte centralizzazione dei segnali generalmente coordina meglio la locomozione. Potrebbe essere un codice che viaggia attraverso il cablaggio di un robot elaborato, i neuroni centrali di uno scarafaggio che sincronizzano le zampe, o il telaio del robot ingombrante che si inclina lontano da una gamba che batte il terreno, caricando così il peso su una gamba avversaria. I robotisti devono vedere attraverso le differenze e capire l'interazione dei segnali locali e centrali di un locomotore.
Fisica fantastica
La nuova "misura" lo fa concentrandosi su un fenomeno generale nelle gambe che camminano, che può essere visto come un pendolo che si muove avanti e indietro. Per una grande locomozione, hanno bisogno di sincronizzarsi in quelle che vengono chiamate oscillazioni di accoppiamento di fase.
Un divertimento, esperimento facile illustra questo principio di fisica. Se pochi, dì sei, i metronomi - il ticchettio del pendolo ritmico che usano gli insegnanti di pianoforte - oscillano fuori sincrono, e li metti tutti su una piattaforma che oscilla liberamente insieme alle oscillazioni dei metronomi, gli swing si sincronizzeranno all'unisono.
Le fasi, o indicazioni, delle loro oscillazioni si accoppiano tra loro centralizzando i loro impulsi meccanici compositi attraverso la piattaforma. Questo particolare esempio di accoppiamento di fase è meccanico, ma può anche essere computazionale o neurologico, come nello scarafaggio.
Le sue gambe sarebbero analoghe ai metronomi oscillanti, e l'attività neuromuscolare centrale analoga alla piattaforma a oscillazione libera. Nello scarafaggio, non tutte e sei le gambe oscillano nella stessa direzione.
"La loro sincronizzazione non è uniforme. Tre gambe sono sincronizzate in fase l'una con l'altra - le gambe anteriore e posteriore di un lato con la gamba centrale dell'altro lato - e quelle tre sono sincronizzate fuori fase con le altre tre, " Ha detto Neveln. "È un'andatura alternata del treppiede. Un treppiede a tre gambe si alterna con l'altro treppiede a tre gambe."
Pogo inutile
E proprio come pendula, le oscillazioni di ogni gamba possono essere rappresentate graficamente come un'onda. Tutte le onde delle gambe possono essere mediate in un'onda di fretta complessiva e quindi sviluppate in una matematica più utile che mette in relazione la centralizzazione con il decentramento e fattori come l'entropia che possono eliminare il controllo della locomozione.
I principi e la matematica risultanti hanno avvantaggiato il robot goffo, che ha forti segnali decentralizzati nei motori delle gambe che reagiscono al contatto delle gambe con il suolo, e il controllo centralizzato è più debole di quello dell'insetto. I ricercatori hanno tracciato un grafico dei movimenti del robot, pure, ma non risultavano nel gruppo di onde perfettamente sincronizzato che aveva lo scarafaggio.
I ricercatori si sono rivolti con i principi e la matematica al robot goffo, che inizialmente era fuori posto:sgroppare o saltare inutilmente come un pogo stick. Quindi gli scienziati hanno rafforzato il controllo centralizzato ripesando il suo telaio per farlo muovere in modo più coerente.
"I metronomi sulla piattaforma sono accoppiamento meccanico, e il nostro robot coordina il controllo in questo modo, " Ha detto Neveln. "È possibile modificare l'accoppiamento meccanico del robot riposizionando i suoi pesi. Siamo stati in grado di prevedere i cambiamenti che ciò avrebbe apportato utilizzando la misura che abbiamo sviluppato dallo scarafaggio".
Sorprese di scarafaggi
I ricercatori hanno anche cablato specifici muscoli e neuroni di scarafaggio per osservare le loro sincopi con le onde di fretta. Diciassette scarafaggi ne hanno presi 2, 982 fa passi da gigante per informare i principi e la matematica, e gli insetti hanno anche sorpreso i ricercatori.
Uno spiccava:gli scienziati avevano pensato che la segnalazione fosse più centralizzata quando lo scarafaggio accelerava, ma invece, rafforzata la segnalazione sia centrale che locale, forse raddoppiando sul messaggio:Run!