Credito:Wayve
Un team di ricercatori della startup britannica Wayve ha sviluppato un modo per applicare il deep learning networking alla guida autonoma. In un recente post sul blog (insieme al video dimostrativo di YouTube di accompagnamento) i rappresentanti hanno illustrato come funziona la loro tecnologia, e offrire una dimostrazione utilizzando un'auto reale su una strada reale.
Come osserva il team di Wayve, la maggior parte delle auto a guida autonoma utilizza una serie di telecamere e sensori, insieme a strumenti di mappatura e molta programmazione per computer. Ma un tale approccio, litigano, si affaccia su quello che sembra essere una sorta di soffitto. Le auto autonome programmate da grandi aziende come Google hanno raggiunto un punto in cui sono buone, ma non abbastanza buono per l'uso comune. Questo, essi sostengono, è perché tali auto non sono ancora abbastanza intelligenti per gestire la miriade di condizioni presenti su una strada media. Ciò che è necessario, suggeriscono, è un computer più intelligente, non più sensori o programmazione.
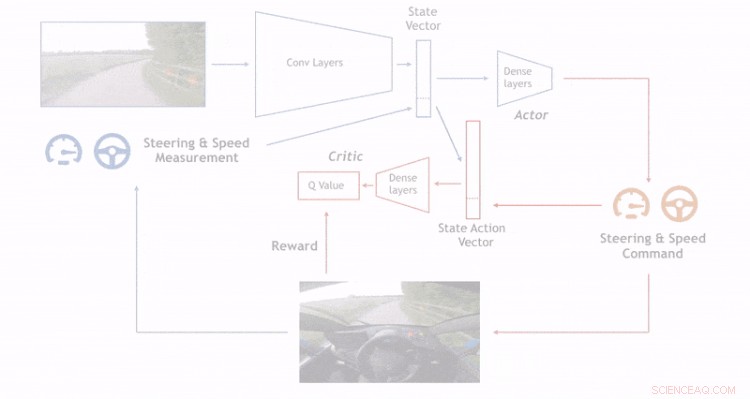
Il team di Wayve crede che un approccio più intelligente sia utilizzare algoritmi di apprendimento per rinforzo come quelli utilizzati in progetti come DeepMind:lasciare che il computer impari a fare qualcosa allo stesso modo delle persone, praticando. Gli algoritmi di apprendimento per rinforzo sono il cuore delle reti di apprendimento profondo:imparano facendo, ancora e ancora, migliorando man mano che vanno. In caso di controllo autonomo del veicolo, ciò significherebbe guidare un'auto finché non lo fanno bene.
Per dimostrare come un tale approccio possa funzionare, un team di Wayve ha equipaggiato una Renault Twizy con una sola telecamera e gas, l'ingranaggio di controllo del freno e dello sterzo e poi li ha collegati a un processore grafico e un computer che esegue algoritmi di apprendimento di rinforzo che l'azienda ha sviluppato. Al computer è stato "detto" che il risultato ottimale sarebbe stato l'avanzamento dell'auto lungo una strada senza lasciare la strada. Più a lungo potrebbe farlo, meglio è. Hanno quindi aggiunto un guidatore umano e hanno posizionato l'auto su una strada di campagna. Il guidatore umano indirizzerà l'auto nella giusta direzione e poi permetterà al computer di prendere il sopravvento. Se l'auto si avvicinava all'uscita di strada, l'umano lo fermerebbe, fai allineare l'auto e poi dai un'altra possibilità al computer. In questo modo, il computer è stato in grado di imparare come evitare che l'auto finisse fuori strada in circa 20 minuti. Dopo di che, poteva continuare all'infinito.
© 2018 Tech Xplore