Credito:MIT
Anni fa, Il professor Neil Gershenfeld del MIT ha avuto un pensiero audace. Colpito dal fatto che tutti gli esseri viventi del mondo sono costituiti da combinazioni di soli 20 amminoacidi, si chiedeva:sarebbe possibile creare un kit di sole 20 parti fondamentali che potrebbero essere utilizzate per assemblare tutti i diversi prodotti tecnologici del mondo?
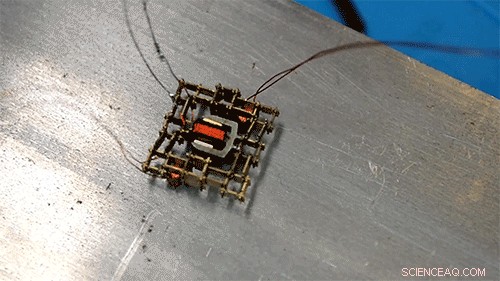
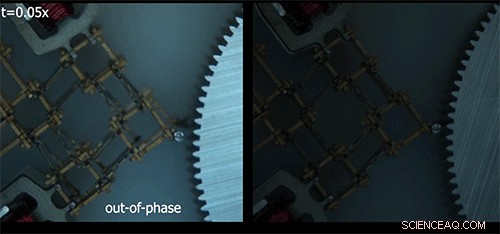
Da allora Gershenfeld e i suoi studenti hanno fatto progressi costanti in quella direzione. Il loro ultimo traguardo, presentato questa settimana a una conferenza internazionale sulla robotica, consiste in un insieme di cinque minuscole parti fondamentali che possono essere assemblate in un'ampia varietà di dispositivi funzionali, compreso un minuscolo motore "a piedi" che può muoversi avanti e indietro su una superficie o far girare gli ingranaggi di una macchina.
In precedenza, Gershenfeld e i suoi studenti hanno mostrato che le strutture assemblate da molti piccoli, subunità identiche possono avere numerose proprietà meccaniche. Prossimo, hanno dimostrato che una combinazione di tipi di parti rigide e flessibili può essere utilizzata per creare ali di aeroplano morphing, un obiettivo di lunga data nell'ingegneria aerospaziale. Il loro ultimo lavoro aggiunge componenti per il movimento e la logica, e sarà presentato alla Conferenza Internazionale sulla Manipolazione, Automazione e robotica su piccola scala (MARSS) a Helsinki, Finlandia, in un articolo di Gershenfeld e dello studente laureato del MIT Will Langford.
Il loro lavoro offre un'alternativa agli approcci odierni alla costruzione di robot, che rientrano in gran parte in uno dei due tipi:macchine personalizzate che funzionano bene ma sono relativamente costose e poco flessibili, e quelli riconfigurabili che sacrificano le prestazioni per la versatilità. Nel nuovo approccio, Langford ha inventato una serie di componenti su scala millimetrica, tutti possono essere collegati tra loro tramite un connettore standard. Queste parti includono i precedenti tipi rigidi e flessibili, insieme a parti elettromagnetiche, una bobina, e un magnete. Nel futuro, il team prevede di realizzarli con tipi di parti di base ancora più piccoli.
Credito:MIT
Usando questo semplice kit di minuscole parti, Langford li ha assemblati in un nuovo tipo di motore che muove un'appendice in discreti passaggi meccanici, che può essere usato per girare una ruota dentata, e una forma mobile del motore che trasforma quei passi in locomozione, permettendogli di "camminare" su una superficie in un modo che ricorda i motori molecolari che muovono i muscoli. Queste parti potrebbero anche essere assemblate nelle mani per la presa, o gambe per camminare, come necessario per un compito particolare, e poi riassemblati quando tali esigenze cambiano. Gershenfeld li chiama "materiali digitali, "parti discrete che possono essere unite in modo reversibile, formando una sorta di micro-LEGO funzionale.
Il nuovo sistema è un passo significativo verso la creazione di un kit standardizzato di parti che potrebbero essere utilizzate per assemblare robot con capacità specifiche adattate a un particolare compito o insieme di compiti. Tali robot appositamente costruiti potrebbero quindi essere smontati e rimontati secondo necessità in una varietà di forme, senza la necessità di progettare e realizzare da zero nuovi robot per ogni applicazione.
Il motore iniziale di Langford ha la capacità di una formica di sollevare sette volte il proprio peso. Ma se sono necessarie forze maggiori, molte di queste parti possono essere aggiunte per fornire più grinta. O se il robot ha bisogno di muoversi in modi più complessi, queste parti potrebbero essere distribuite in tutta la struttura. La dimensione degli elementi costitutivi può essere scelta in base alla loro applicazione; il team ha realizzato parti di dimensioni nanometriche per realizzare nanorobot, e parti di dimensioni di un metro per creare megarobot. In precedenza, erano necessarie tecniche specializzate a ciascuno di questi estremi della scala di lunghezza.
"Un'applicazione emergente è quella di realizzare piccoli robot in grado di lavorare in spazi ristretti, " dice Gershenfeld. Alcuni dei dispositivi assemblati in questo progetto, Per esempio, sono più piccoli di un centesimo ma possono svolgere compiti utili.
Per costruire nei "cervelli, " Langford ha aggiunto tipi di parti che contengono circuiti integrati di dimensioni millimetriche, insieme ad alcuni altri tipi di parti per occuparsi del collegamento di segnali elettrici in tre dimensioni.
La semplicità e la regolarità di queste strutture rende relativamente facile l'automazione del loro montaggio. Fare quello, Langford ha sviluppato una nuova macchina che è come un incrocio tra una stampante 3D e le macchine pick-and-place che producono circuiti elettronici, ma a differenza di entrambi, questo può produrre sistemi robotici completi direttamente da progetti digitali. Gershenfeld afferma che questa macchina è un primo passo verso l'obiettivo finale del progetto di "creare un assemblatore in grado di assemblare se stesso dalle parti che sta assemblando".
"La standardizzazione è una questione estremamente importante nella microrobotica, ridurre i costi di produzione e, di conseguenza, migliorare l'accettazione di questa tecnologia al livello dei normali robot industriali, "dice Sergej Fatikow, capo della Divisione di Microrobotica e Ingegneria di Controllo, all'Università di Oldenburg, Germania, che non era associato a questa ricerca. Il nuovo lavoro "indirizza l'assemblaggio di sofisticati sistemi microrobotici da un piccolo insieme di blocchi standard, che potrebbe rivoluzionare il campo della microrobotica e aprire numerose applicazioni su piccola scala, " lui dice.
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.