Un piccolo robot senza equipaggio Clearpath Husky, che è stato utilizzato dai ricercatori dell'ARL per sviluppare una nuova tecnica per insegnare rapidamente ai robot nuovi comportamenti di attraversamento con una supervisione umana minima. Credito:esercito americano
I ricercatori del Laboratorio di ricerca dell'esercito degli Stati Uniti e del Robotics Institute della Carnegie Mellon University hanno sviluppato una nuova tecnica per insegnare rapidamente ai robot nuovi comportamenti di attraversamento con una supervisione umana minima.
La tecnica consente alle piattaforme robot mobili di navigare autonomamente negli ambienti mentre eseguono azioni che un essere umano si aspetterebbe dal robot in una determinata situazione.
Gli esperimenti dello studio sono stati recentemente pubblicati e presentati all'Institute of Electrical and Electronics Engineers' International Conference on Robotics and Automation tenutasi a Brisbane, Australia.
I ricercatori dell'ARL Dott. Maggie Wigness e John Rogers si sono impegnati in discussioni faccia a faccia con centinaia di partecipanti alla conferenza durante la loro presentazione interattiva di due ore e mezza.
Secondo Wigness, uno degli obiettivi del team di ricerca nella ricerca sui sistemi autonomi è fornire al Soldato compagni di squadra robot autonomi affidabili.
"Se un robot agisce come un compagno di squadra, i compiti possono essere eseguiti più velocemente e si può ottenere una maggiore consapevolezza della situazione, " Wigness ha detto. "Inoltre, i compagni di squadra robot possono essere utilizzati come investigatore iniziale per scenari potenzialmente pericolosi, mantenendo così i soldati più lontani dal male."
Per realizzare questo, Wigness ha detto che il robot deve essere in grado di usare la sua intelligenza appresa per percepire, ragionare e prendere decisioni.
"Questa ricerca si concentra su come l'intelligenza dei robot può essere appresa da alcuni esempi di dimostrazioni umane, " Wigness ha detto. "Il processo di apprendimento è veloce e richiede una minima dimostrazione umana, rendendolo una tecnica di apprendimento ideale per l'apprendimento al volo sul campo quando i requisiti della missione cambiano."
I ricercatori di ARL e CMU hanno concentrato la loro indagine iniziale sull'apprendimento dei comportamenti di attraversamento dei robot rispetto alla percezione visiva del terreno e degli oggetti nell'ambiente da parte del robot.
Più specificamente, al robot è stato insegnato come navigare da vari punti dell'ambiente rimanendo vicino al bordo di una strada, e anche come attraversare di nascosto usando gli edifici come copertura.
Secondo i ricercatori, assegnati diversi compiti di missione, il comportamento di attraversamento appreso più appropriato può essere attivato durante il funzionamento del robot.
Questo viene fatto sfruttando il controllo ottimale inverso, comunemente indicato anche come apprendimento per rinforzo inverso, che è una classe di apprendimento automatico che cerca di recuperare una funzione di ricompensa data una politica ottimale nota.
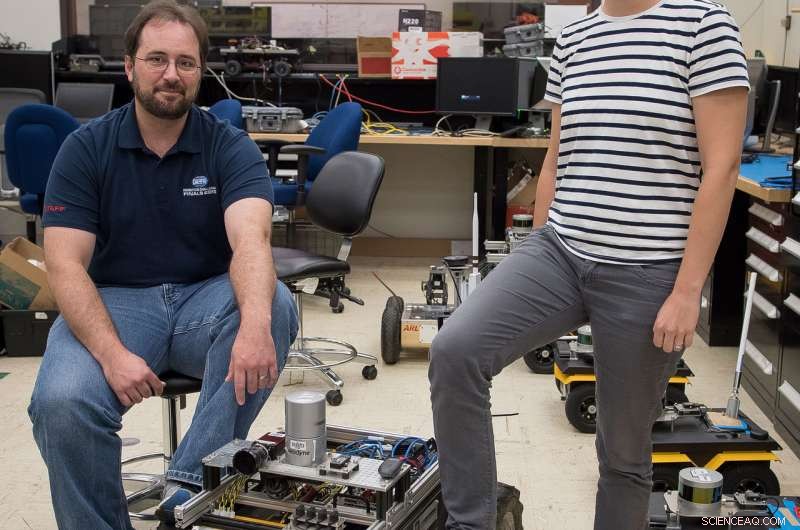
I ricercatori dell'ARL Dott. Maggie Wigness e John Rogers posano con un piccolo robot senza equipaggio Clearpath Husky nel loro laboratorio all'Adelphi Laboratory Center nel Maryland. Credito:esercito americano
In questo caso, un essere umano dimostra la politica ottimale guidando un robot lungo una traiettoria che meglio rappresenta il comportamento da apprendere.
Questi esempi di traiettoria sono quindi correlati alle caratteristiche visive del terreno/oggetto, come l'erba, strade ed edifici, apprendere una funzione di ricompensa rispetto a queste caratteristiche ambientali.
Sebbene esistano ricerche simili nel campo della robotica, ciò che sta facendo ARL è particolarmente unico.
"Le sfide e gli scenari operativi su cui ci concentriamo qui in ARL sono estremamente unici rispetto ad altre ricerche in corso, " Wigness ha detto. "Cerchiamo di creare sistemi robotici intelligenti che operino in modo affidabile in ambienti di combattimento, il che significa che la scena è altamente destrutturata, forse rumoroso, e dobbiamo farlo con una conoscenza a priori relativamente scarsa dello stato attuale dell'ambiente. Il fatto che la nostra affermazione del problema sia così diversa da tanti altri ricercatori consente all'ARL di avere un enorme impatto nella ricerca sui sistemi autonomi. Le nostre tecniche, per la definizione stessa del problema, devono essere resistenti al rumore e avere la capacità di apprendere con quantità relativamente piccole di dati."
Secondo Wigness, questa ricerca preliminare ha aiutato i ricercatori a dimostrare la fattibilità dell'apprendimento rapido di una codifica dei comportamenti di attraversamento.
"Mentre spingiamo questa ricerca al livello successivo, inizieremo a concentrarci su comportamenti più complessi, che può richiedere l'apprendimento da più di semplici caratteristiche di percezione visiva, " Wigness ha detto. "Il nostro quadro di apprendimento è abbastanza flessibile da utilizzare informazioni a priori che possono essere disponibili su un ambiente. Ciò potrebbe includere informazioni su aree che sono probabilmente visibili da avversari o aree note per avere una comunicazione affidabile. Queste informazioni aggiuntive possono essere rilevanti per alcuni scenari di missione, e l'apprendimento rispetto a queste caratteristiche migliorerebbe l'intelligenza del robot mobile."
I ricercatori stanno anche esplorando il modo in cui questo tipo di apprendimento del comportamento si trasferisce tra diverse piattaforme mobili.
La loro valutazione fino ad oggi è stata eseguita con un piccolo robot senza equipaggio Clearpath Husky, che ha un campo visivo relativamente basso rispetto al suolo.
"Il trasferimento di questa tecnologia su piattaforme più grandi introdurrà nuovi punti di vista percettivi e diverse capacità di manovra della piattaforma, " Wigness said. "Learning to encode behaviors that can be easily transferred between different platforms would be extremely valuable given a team of heterogeneous robots. In questo caso, the behavior can be learned on one platform instead of each platform individually."
This research is funded through the Army's Robotics Collaborative Technology Alliance, or RCTA, which brings together government, industrial and academic institutions to address research and development required to enable the deployment of future military unmanned ground vehicle systems ranging in size from man-portables to ground combat vehicles.
"ARL is positioned to actively collaborate with other members of the RCTA, leveraging the efforts of top researchers in academia to work on Army problems, " Rogers said. "This particular research effort was the synthesis of several components of the RCTA with our internal research; it would not have been possible if we didn't work together so closely."
In definitiva, this research is crucial for the future battlefield, where Soldiers will be able to rely on robots with more confidence to assist them in executing missions.
"The capability for the Next Generation Combat Vehicle to autonomously maneuver at optempo in the battlefield of the future will enable powerful new tactics while removing risk to the Soldier, " Rogers said. "If the NGCV encounters unforeseen conditions which require teleoperation, our approach could be used to learn to autonomously handle these types of conditions in the future."