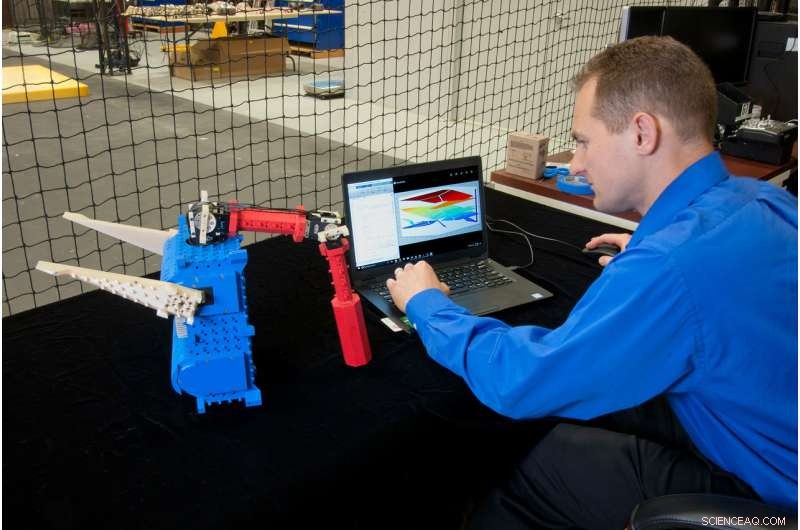
Dottor Chad Kessens, un robotista con il laboratorio di ricerca dell'esercito americano ad Aberdeen Proving Ground, Md., propone idee innovative per i futuri robot militari. Credito:Laboratorio di ricerca dell'esercito
Gli scienziati dell'U.S. Army Research Laboratory e del Johns Hopkins University Applied Physics Laboratory hanno sviluppato un software per garantire che se un robot cade, può rialzarsi, il che significa che i futuri robot militari faranno meno affidamento sui loro gestori di Soldati.
Sulla base del feedback dei soldati durante un corso di addestramento dell'esercito, Il ricercatore dell'ARL, il dott. Chad Kessens, iniziò a sviluppare un software per analizzare se un dato robot potesse "rimettersi in piedi" da qualsiasi orientamento capovolto.
"Un soldato mi ha detto che apprezzava così tanto il suo robot, è sceso dal suo veicolo per salvare il robot quando non è riuscito a farlo tornare indietro, " Kessens ha detto. "Questa è una storia che non voglio mai più sentire".
Ricercatori della Marina PMS-408 (missioni di spedizione) e del suo braccio tecnico, l'Indian Head Explosive Ordnance Disposal Technology Division, essere d'accordo. Hanno collaborato con JHU/APL e l'appaltatore principale, Northrop Grumman Remotec, sviluppare il sistema robotico avanzato per l'eliminazione di ordigni esplosivi, o AEODRS, una nuova famiglia di sistemi robotici EOD caratterizzati da un'architettura di sistemi modulari aperti. Una piattaforma zaino in spalla leggera, che è l'incremento di uno del programma, dovrebbe entrare in produzione entro la fine dell'anno. Un requisito fondamentale del programma è che i robot devono essere in grado di auto-raddrizzarsi.
"Questi robot esistono per tenere i soldati fuori dai guai, " ha detto Reed Young, Responsabile del programma di robotica e autonomia presso JHU/APL. "L'auto-raddrizzamento è una capacità fondamentale che servirà solo a questo scopo".
Per valutare la capacità del sistema AEODRS di auto-diritto, JHU/APL ha collaborato con ARL per sfruttare il software sviluppato da Kessens. Il team è stato in grado di estendere la sua capacità ai robot con un numero maggiore di giunti (o gradi di libertà) grazie all'esperienza del ricercatore JHU/APL Galen Mullins nelle tecniche di campionamento adattivo.
"L'analisi su cui ho lavorato esamina tutte le possibili geometrie e orientamenti in cui il robot potrebbe trovarsi, " ha detto Kessens. "Il problema è che ogni giunto aggiuntivo aggiunge una dimensione allo spazio di ricerca, quindi è importante cercare nei posti giusti gli stati e le transizioni stabili. Altrimenti, la ricerca potrebbe richiedere troppo tempo."

I ricercatori esplorano nuove tecniche utilizzando la piattaforma Advanced Explosive Ordnance Disposal Robotic System Increment 1. Credito:Laboratorio di ricerca dell'esercito
Kessens ha affermato che il lavoro di Mullins è ciò che ha permesso all'analisi di funzionare in modo efficiente per analizzare i sistemi a più alto grado di libertà. Mentre il lavoro di Kessens determina cosa cercare e come, Mullins capisce dove guardare."
"Questa analisi è stata resa possibile dal nostro strumento di pianificazione del contraddittorio di nuova concezione, o RAPT, un framework software per testare sistemi autonomi e robotici, " Mullins ha detto. "Inizialmente abbiamo sviluppato il software per i veicoli subacquei, ma quando Chad ha spiegato il suo approccio al problema dell'auto-raddrizzamento, Ho subito visto come queste tecnologie potevano lavorare insieme."
Ha detto che la chiave di questo software è un algoritmo di campionamento adattivo che cerca le transizioni.
"Per questo lavoro, stavamo cercando stati in cui il robot potesse passare da una configurazione stabile a una instabile, provocando così il ribaltamento del robot, " ha spiegato Mullins. "Le mie tecniche sono state in grado di prevedere efficacemente dove potrebbero essere quelle transizioni in modo da poter cercare nello spazio in modo efficiente".
In definitiva, il team è stato in grado di valutare gli otto gradi di libertà del sistema AEODRS e ha determinato che può raddrizzarsi su un terreno pianeggiante, indipendentemente dallo stato iniziale in cui si trova. L'analisi genera anche piani di movimento che mostrano come il robot può riorientarsi. I risultati del team possono essere trovati in "Valutazione delle capacità di auto-raddrizzamento del robot utilizzando il campionamento adattivo, " pubblicato in IEEE's Lettere di robotica e automazione in agosto.
Al di là della valutazione di un robot specifico, Kessens considera il framework di analisi importante per la capacità dei militari di confrontare i robot di diversi fornitori e selezionare quello migliore per l'acquisto.
"L'esercito e la marina vogliono robot in grado di autoregolarsi, ma stiamo ancora lavorando per capire e valutare cosa significa, " Kessens ha detto. "Giustizia a quali condizioni? Abbiamo sviluppato un'analisi metrica per valutare la capacità di un robot di auto-raddrizzarsi su un terreno planare inclinato, e potremmo persino usarlo come strumento per migliorare la progettazione dei robot. Il nostro prossimo passo è determinare di cosa è capace un robot su un terreno irregolare".