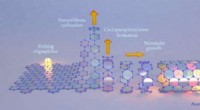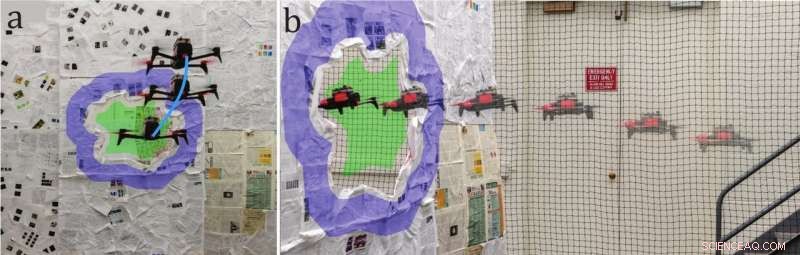
Diverse parti della pipeline:(a) rilevamento del gap sconosciuto utilizzando la visione attiva e l'algoritmo TS2P (l'evidenziazione in ciano mostra il percorso seguito per ottenere più immagini per il rilevamento), (b) Sequenza del quadrirotore che passa attraverso il divario sconosciuto utilizzando il controllo basato sul servocomando visivo. Le luci blu e verde rappresentano rispettivamente le regioni di primo piano e di sfondo tracciate. Attestazione:arXiv:1802.05330 [cs.RO]
I ricercatori hanno escogitato un sistema bioispirato per aiutare i droni a passare attraverso piccoli spazi vuoti. I ricercatori hanno testato il loro sistema e hanno scritto un'analisi in un articolo pubblicato su Lettere IEEE sulla robotica e l'automazione .
"GapFlyt:rilevamento del gap senza struttura minimalista basato sulla visione attiva per il volo Quadrotor" è di Nitin J. Sanket, Chahat Deep Singh, Kanishka Ganguly, Cornelia Fermüller e Yiannis Aloimonos. Gli autori provengono dal gruppo Perception and Robotics dell'Università del Maryland a College Park.
Hanno lavorato a un design di ispirazione bio per i quadrirotori. Questa è una struttura destinata ai quadrirotori per volare attraverso "lacune sconosciute senza una ricostruzione 3D della scena, " hanno affermato, "usando solo una fotocamera monoculare e il rilevamento a bordo".
Il loro tentativo di notare che tutto questo è senza una ricostruzione 3D ha uno sguardo più attento. Altrove, hanno spiegato che "ricercatori e professionisti oggi utilizzano algoritmi di visione artificiale tradizionali con l'obiettivo di costruire una rappresentazione di applicabilità generale:una ricostruzione 3D della scena. Utilizzando questa rappresentazione, le attività di pianificazione sono costruite e realizzate per consentire al quadrirotore di dimostrare un comportamento autonomo. Questi metodi sono inefficienti in quanto non sono guidati da attività".
Basta guardare gli insetti volanti e gli uccelli:risolvere da soli il problema della navigazione e del controllo complesso per secoli, senza la necessità di costruire una mappa 3D, loro hanno detto, e sono altamente task-driven.
Evan Ackerman in Spettro IEEE gentilmente offerto una lezione di api.
"Le api fanno questo lavoro attraverso una sorta di approccio minimalista alla forza bruta al problema:volano fino a un piccolo foro o spazio vuoto, librarsi, vagare un po' avanti e indietro per raccogliere informazioni visive su dove si trovano i bordi del divario, e poi guidarsi attraverso. non è veloce, e non è particolarmente elegante, ma è affidabile e non ci vuole molto per essere eseguito."
Il titolo del loro articolo rispecchia proprio la domanda che si sono posti come squadra:"Può un quadrirotore riuscire a passare attraverso uno spazio di forma arbitraria senza costruire un modello 3D esplicito di una scena, usando solo una fotocamera monoculare?"
Lo hanno messo alla prova in esperimenti con diverse impostazioni e forme di finestre. Il quadro proposto è stato testato su un quadrirotore per hobby modificato, Pappagallo Bebop 2.
Spettro IEEE portava una didascalia fotografica che descriveva ulteriormente ciò che usavano per gli esperimenti. Il drone modificato, diceva la didascalia, incluso un modulo NVIDIA TX2 montato nella parte superiore. Per il rilevamento, il drone ha usato la sua fotocamera frontale e un sensore di flusso ottico rivolto verso il basso, che combina una fotocamera e un sonar.
Risultati? Hanno affermato di aver raggiunto "un tasso di successo dell'85% a 2,5 m/s, anche con una tolleranza minima di soli 5 cm."
Spettro IEEE hanno notato che hanno ottenuto quel tasso di successo in oltre 150 prove "per diverse finestre di forma arbitraria in un'ampia gamma di condizioni che include una finestra con una tolleranza minima di soli 5 cm".
Per quanto riguarda la velocità massima che il drone è stato in grado di raggiungere mentre attraversava il varco, 2,5 m/s, Ackerman ha affermato che era "principalmente vincolato dalla fotocamera a tapparella (che potrebbe disturbare il flusso ottico a velocità più elevate), ma di nuovo, questo metodo non è davvero pensato per i droni ad alte prestazioni."
Perché il loro lavoro è importante:questo documento affronta il problema del rilevamento di spazi vuoti di una forma e posizione sconosciute con una fotocamera monoculare e il rilevamento a bordo. Questo non vuol dire, la questione del superamento delle lacune è nuova. Gli autori hanno sottolineato che "il problema del superamento delle lacune affascina i ricercatori da molti anni". Ricercatori altrove hanno presentato algoritmi per la pianificazione e il controllo e gli autori hanno affermato che alcuni lavori hanno aperto la strada all'approccio bioispirato che hanno utilizzato nel documento.
© 2018 Tech Xplore