Interazione fisica robot-robot. Credito:Tirupachuri et al.
I ricercatori dell'Istituto Italiano di Tecnologia (IIT) hanno recentemente proposto un formalismo della dinamica accoppiata e un nuovo approccio per sfruttare le interazioni utili con i robot umanoidi. La loro carta, che è stato pre-pubblicato su arXiv, presenta anche una serie di task-based, tecniche partner-aware per il controllo di robot umanoidi.
"I robot si stanno evolvendo a un ritmo rapido, e molti sviluppi recenti mirano ad abbattere le recinzioni in cui sono attualmente collocati i robot e a renderli più sicuri per interagire fisicamente con l'ambiente e le persone, " Yeshasvi Tirupachuri, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore.
I robot umanoidi sono progettati per assomigliare agli umani, incarnando abilità antropomorfe che consentono loro di interagire attivamente con gli ambienti umani. Oltre a garantire che siano reattivi alle interazioni fisiche con agenti esterni, questo team di ricercatori dell'IIT sta anche cercando di renderli capaci di impegnarsi attivamente e interagire con gli agenti per realizzare un obiettivo comune.
"Pensiamo che questo approccio di ricerca consenta a un robot di essere più intraprendente in molti compiti, sia per assistere gli esseri umani sia per aumentare le capacità umane, "dice Tirupachuri.
L'Istituto Italiano di Tecnologia (IIT) sta attualmente lavorando a un progetto denominato An.Dy, finanziato dalla Commissione Europea, mirato a migliorare la collaborazione uomo-robot e robot-robot. I loro recenti sforzi di ricerca si sono concentrati in particolare sulla comprensione e lo sfruttamento delle interazioni fisiche dei robot umanoidi con gli agenti esterni.
"Gli obiettivi principali del nostro studio erano formulare un quadro matematico generale, questo è, una lingua, attraverso cui un robot può comprendere le sue interazioni fisiche con agenti esterni, oltre a definire come queste interazioni possono essere sfruttate per il completamento di qualsiasi compito da parte del robot, " Disse Tirupachuri.
Nel loro articolo pubblicato di recente, i ricercatori hanno presentato un formalismo delle dinamiche accoppiate e un nuovo approccio per migliorare le interazioni con i robot umanoidi, così come nuovi task-based, tecniche partner-aware per il controllo di robot umanoidi.
"Un robot è un sistema composto da più corpi rigidi, " Ha spiegato Tirupachuri. "Le leggi della fisica che governano un tale sistema di corpi rigidi è incapsulato nella dinamica del sistema che aiuta a capire come il sistema si evolve nel tempo sotto le influenze esterne. In caso di più agenti impegnati in un'interazione fisica, le dinamiche dei singoli agenti, osservata isolatamente, non fornirà informazioni sufficienti per dare un senso all'evoluzione del suo sistema."
Questa limitazione è principalmente dovuta alle complessità dell'accoppiamento meccanico durante le interazioni fisiche di un robot umanoide. Secondo i ricercatori, per comprendere meglio queste interazioni, devono considerare le dinamiche di entrambi i sistemi interagenti insieme, piuttosto che in isolamento.

Credito:IIT
"Quindi prendiamo in considerazione la dinamica del sistema combinato e presentiamo un formalismo della dinamica accoppiata attraverso il quale la dinamica del robot può essere compresa a fondo nelle interazioni fisiche con qualsiasi agente esterno, " Disse Tirupachuri. "Verso questo obiettivo, le dinamiche degli agenti interagenti sono anche formulate in un linguaggio matematico, simile al sistema robotico, utilizzando ipotesi di corpo rigido."
Tipicamente, i sensori forza-coppia sono posizionati su un robot umanoide, permettendogli di dare un senso alle perturbazioni esterne causate da un agente interagente esterno. I ricercatori, però, ha deciso di concentrarsi specificamente sugli sforzi spesi da un agente esterno durante l'interazione con un sistema robotico.
"Lo sforzo di un agente è, di grande portata, autogovernato e autoregolato, anche in interazioni fisiche, " Ha spiegato Tirupachuri. "Sotto i presupposti dei sistemi del corpo rigido, lo sforzo di un agente è quantitativamente rappresentato dalle coppie congiunte. Quindi, attraverso dinamiche accoppiate, le nostre tecniche di controllo consentono al robot di capire come avvengono le interazioni con un agente esterno in termini di sforzo dell'agente. Infine, il robot sfrutta questo sforzo se è utile per raggiungere un obiettivo comune."
In contrasto con gli sforzi precedenti, perciò, l'approccio ideato da Tirupachuri e dai suoi colleghi è volto a migliorare la consapevolezza di un robot degli agenti esterni con cui sta interagendo. La loro ricerca potrebbe aprire la strada allo sviluppo di robot umanoidi più reattivi che si comportano meglio in compiti che comportano interazioni uomo-robot.
"Lo scenario che stiamo immaginando coinvolge un umano e un robot umanoide impegnati in un'interazione fisica, " Ha detto Tirupachuri. "Questo tipo di scenario sarà importante nel futuro ambiente di lavoro, dove robot e umani collaboreranno per favorire l'"ergonomia" dello spazio di lavoro, evitando così situazioni pericolose per la salute umana. In uno scenario del genere, l'essere umano indossa una tuta sensoriale che esegue un nuovo algoritmo sviluppato dal nostro team per ottenere informazioni cinematiche e dinamiche complete in tempo reale dall'essere umano".
Durante il test del loro quadro di controllo generale su due robot umanoidi iCub, i ricercatori hanno incontrato una serie di sfide che devono essere adeguatamente affrontate per portare avanti il progetto.
"Le principali limitazioni che dobbiamo affrontare sono dovute ad alcuni aspetti dell'attuale design meccanico delle mani iCub che chiaramente non sono in grado di eseguire alcuna presa di potenza per impegnarsi in un'interazione fisica prolungata l'una con l'altra, " Ha detto Tirupachuri. "Stiamo ora sviluppando un nuovo aggeggio meccanico per aggirare questa mancanza".
Tirupachuri e i suoi colleghi stanno ora lavorando su un sistema di stima della dinamica umana in tempo reale. Una volta che questo sistema è completamente sviluppato, hanno in programma di convalidare ulteriormente la loro teoria eseguendo più esperimenti che coinvolgono un agente umano e un robot umanoide.

Una squadra. Credito:IIT
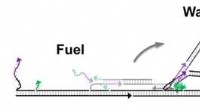
"Siamo anche nelle fasi iniziali della progettazione sperimentale per implementare il nostro approccio su un sistema robotico esoscheletrico che aiuterà un essere umano a svolgere attività sopraelevate su una catena di montaggio in un ambiente di officina industriale, " Ha detto Tirupachuri. "Questo ha lo scopo di migliorare il comfort per gli esseri umani fornendo un supporto ergonomico per eseguire il compito ripetutamente".
Finalmente, i ricercatori stanno anche studiando nuovi scenari di interazione fisica che coinvolgono due robot, ad esempio, trasportare oggetti insieme. Questi compiti comportano ulteriori sfide, poiché il design del controllo dovrà tenere conto della dinamica dell'oggetto considerando anche l'autonomia condivisa dei due robot per realizzare il compito con successo.
© 2018 Tech Xplore