Gambe attaccate a uno degli esapodi dei ricercatori. Credito:Collins et al.
I ricercatori del CSIRO e della Queensland University of Technology hanno recentemente condotto uno studio volto a far evolvere automaticamente la struttura fisica dei robot per migliorarne le prestazioni in ambienti diversi. Questo progetto, finanziato dall'Active Integrated Matter Future Science Platform del CSIRO, è stato concepito da David Howard, ricercatore presso il Robotics and Autonomous Systems Group (RASG) di Data61.
"RASG si concentra sulla robotica da campo, il che significa che abbiamo bisogno che i nostri robot vadano in luoghi remoti e conducano missioni in condizioni avverse, condizioni ambientali difficili, " David Howard ha detto a TechXplore. "La ricerca è nata da un'opportunità identificata, poiché RASG fa ampio uso della stampa 3D per costruire e personalizzare i nostri robot. Questa ricerca dimostra un algoritmo di progettazione in grado di generare automaticamente componenti stampabili in 3D in modo che i nostri robot siano meglio attrezzati per funzionare in ambienti diversi".
L'obiettivo principale dello studio era generare automaticamente componenti in grado di migliorare le prestazioni specifiche dell'ambiente di un robot, con vincoli minimi sull'aspetto di questi componenti. I ricercatori si sono concentrati in particolare sulle gambe di un robot esapode (6 zampe), che può essere implementato in una varietà di ambienti, compresi gli ambienti industriali, foreste pluviali, e spiagge.
"Le gambe sono facilmente convertibili in file stampabili in 3D, in modo che possiamo facilmente stampare le gambe e agganciarle ai nostri esapodi per il dispiegamento, "Ho detto Howard. "Abbiamo ipotizzato che cambiare la forma delle gambe ci avrebbe dato prestazioni diverse e il documento descrive una prima dimostrazione di questa capacità. Ci siamo ispirati alla forza creativa più potente del pianeta, uno che crea continuamente forme che funzionano in condizioni ambientali a volte molto difficili:l'evoluzione."
Una gamba ottimizzata per le superfici dure del suolo. Credito:Collins et al.
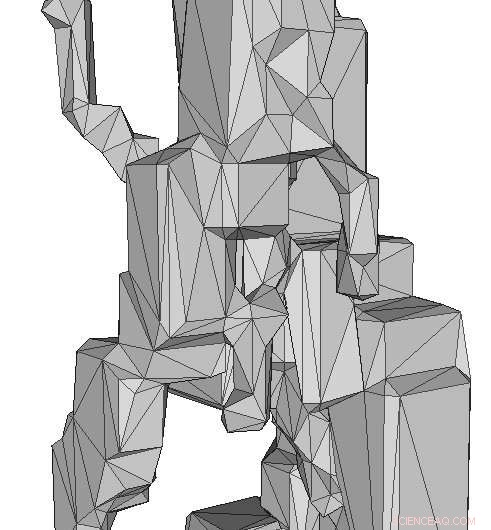
Il sistema sviluppato da Howard e dai suoi colleghi utilizza un algoritmo genetico per ottimizzare le raccolte di spline Bezier (versioni 3-D dello strumento "curva" su Microsoft Paint), definire la forma della tibia del robot. I design delle gambe candidati sono ottimizzati in base a quanto sono adatti a un particolare ambiente. Nel loro studio, questa ottimizzazione si basava su una funzione dell'energia necessaria per camminare in un ambiente e della quantità di materiale necessaria per creare la gamba.
"Iniziamo con una popolazione di gambe casuali, valutarli in un ambiente simulato ad alta fedeltà (ghiaia, terra dura e acqua erano quelli su cui ci siamo concentrati) e ottenere i loro punteggi di fitness, " Howard ha spiegato. "Questi punteggi sono usati per implementare un processo di selezione 'sopravvivenza del più adatto', in modo che le gambe buone vengano mantenute e quelle cattive vengano 'uccise'. Le buone gambe hanno quindi la possibilità di riprodursi, usando analoghi di crossover, in cui una gamba figlio ha le caratteristiche di due gambe genitore, e attraverso la mutazione, dove le caratteristiche delle forme vengono modificate casualmente."
Questo approccio consente all'algoritmo di cercare buone forme da applicare sulle gambe del robot, in uno spazio di possibili soluzioni. I ricercatori hanno generato una serie di gambe figlie e poi le hanno fatte "competere" con le gambe dei genitori per determinare quale sarebbe stata inclusa nel round di generazione successiva. La forma delle gambe del robot è stata ottimizzata automaticamente nel tempo, dopo centinaia di tali generazioni.
Una gamba ottimizzata per le superfici ghiaiose. Credito:Collins et al.
"Siamo stati in grado di mostrare specializzazione ambientale nelle popolazioni di gambe, " Howard ha detto. "Si sono evoluti automaticamente in modo che, Per esempio, impronte più grandi sono state costantemente viste nelle gambe evolute per camminare nella ghiaia, poiché questo impedisce alla gamba di scivolare nella ghiaia e di rimanere bloccata, o spendere energia eccessiva per rimuovere la gamba. Nel terreno duro, d'altra parte, le gambe sono diventate più sottili in quanto non c'era alcuna penalità per avere un'impronta più piccola."
I ricercatori hanno scoperto che le gambe prodotte erano davvero "di nicchia, ' in senso evolutivo. In altre parole, la forma delle gambe variava molto, poiché si erano evoluti per funzionare al meglio in ambienti diversi.
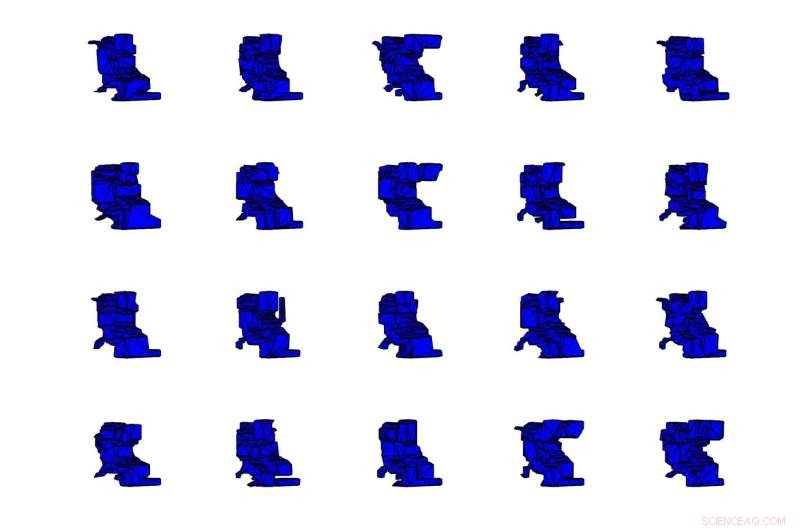
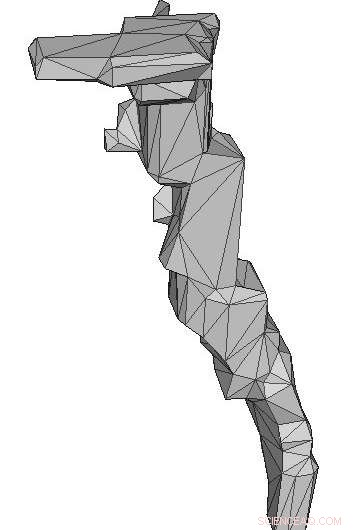
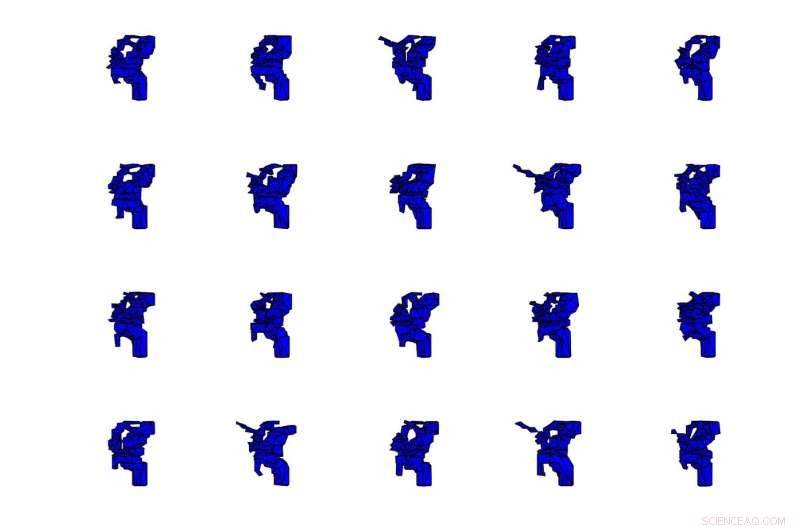
L'immagine mostra cosa succede quando mutiamo una gamba, nota che sono tutte un po' diverse. Ciò è dovuto alla mutazione "genetica" che facciamo sulle curve di Bezier. Alcune di queste variazioni saranno utili e altre dannose, poiché selezioniamo in base alla forma fisica è probabile che le mutazioni più benefiche vengano preservate. Credito:Collins et al.
L'immagine mostra cosa succede quando mutiamo una gamba, nota che sono tutte un po' diverse. Ciò è dovuto alla mutazione "genetica" che facciamo sulle curve di Bezier. Alcune di queste variazioni saranno utili e altre dannose, poiché selezioniamo in base alla forma fisica è probabile che le mutazioni più benefiche vengano preservate. Credito:Collins et al.
"Per quanto riguarda le prestazioni, pure, una gamba ottimale per un ambiente non era altrettanto ottimale in altri ambienti, " Howard ha detto. "Questo è importante perché mostra che il nostro algoritmo crea forme specifiche dell'ambiente".
Lo studio condotto da Howard e dai suoi colleghi potrebbe essere un primo importante passo verso lo sviluppo di robot meglio attrezzati per operare in diversi contesti ambientali. Finora, hanno valutato solo le gambe generate nelle simulazioni. Prima che possano essere distribuiti, perciò, i ricercatori dovranno testare i loro progetti nel mondo reale e dimostrare che si comportano meglio delle gambe convenzionali.

Gambe attaccate a uno degli esapodi dei ricercatori. Credito:Collins et al.
"Vogliamo anche considerare l'utilizzo dell'evoluzione per selezionare diversi tipi di materiale nelle gambe, " Howard ha detto. "Possiamo utilizzare la stampa 3D multi-materiale per creare gambe realizzate con diversi tipi di materiali, che ci aspettiamo migliorerà ulteriormente la capacità delle gambe di lavorare bene in diversi ambienti. Abbiamo anche iniziato a utilizzare rappresentazioni più complesse per le forme delle gambe, in questo caso, reti neurali chiamate reti di produzione di pattern compositivi, che può specificare la forma e le proprietà del materiale delle gambe senza essere limitato a geometrie simili a Bezier."
© 2018 Tech Xplore