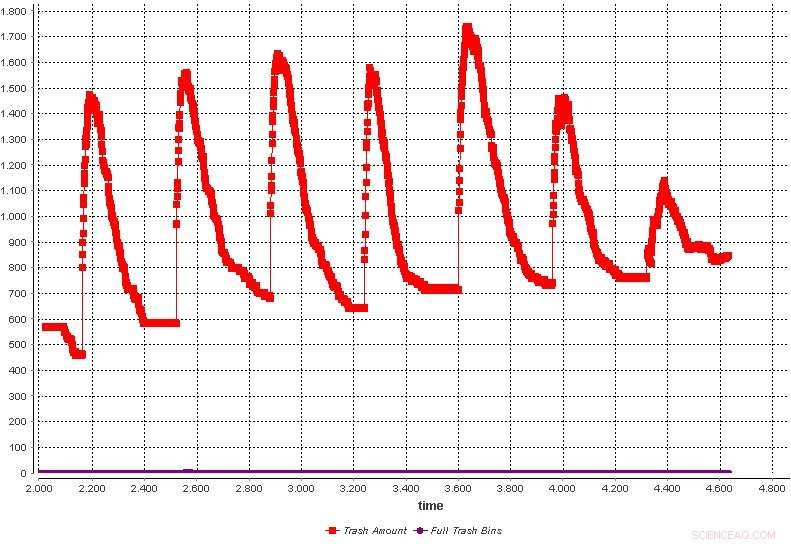
Immagine che mostra la rapidità con cui viene smaltito lo scarico di nuovi rifiuti nell'ambiente urbano. Credito:Alfeo et al.
Ricercatori del MIT Media Lab, l'Università di Pisa, e l'Université Libre de Bruxelles hanno recentemente esplorato la fattibilità dell'utilizzo di sistemi robotici a sciame per la gestione autonoma dei rifiuti. Il loro approccio, delineato in un documento pre-pubblicato su arXiv, applica metodi di raccolta bio-ispirati alla robotica degli sciami, con l'obiettivo di migliorare l'efficienza e l'autonomia della gestione dei rifiuti nelle città.
"Con i veicoli autonomi, sciami di droni per le consegne e squadre di robot che organizzano magazzini, la città del futuro sarà un ecosistema cibernetico composto da macchine e umani, "Antonio Luca Alfeo, uno dei ricercatori che hanno condotto lo studio ha detto a Tech Xplore. "Questo è uno scenario affascinante, così come una grande sfida tecnologica. La gestione di tali sistemi si traduce in una complessità che cresce esponenzialmente man mano che vengono implementate più macchine, soprattutto se vogliamo che "vivano con noi" e reagiscano in modo autonomo alle mutevoli esigenze dell'ambiente circostante".
La natura offre diversi esempi di come problemi di convivenza simili possano essere risolti brillantemente ed efficacemente. Nel loro studio, i ricercatori hanno cercato di applicare queste soluzioni ispirate alla natura alla gestione degli sciami di robot.
"Proponiamo un sistema di smaltimento dei rifiuti con sciami di robot la cui auto-organizzazione si basa sul comportamento degli insetti sociali, noto anche come foraggiamento basato sulla stigmergia, " ha spiegato Alfeo. "Il sistema proposto riguarda lo smaltimento dei rifiuti, dai bidoni della spazzatura a pochi depositi centrali".
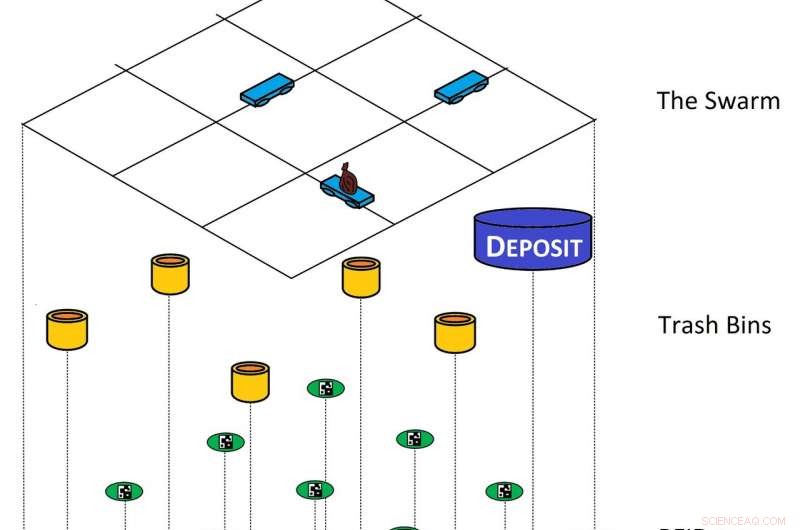
"Feromoni virtuali" rilasciati da altri robot su tag RFID in ambiente urbano. Credito:Alfeo et al.
I robot sviluppati da Alfeo e dai suoi colleghi non sono controllati e impartiti indicazioni da un servizio remoto. Anziché, tutte le loro decisioni sono prese all'improvviso, sulla base delle loro percezioni e osservazioni in tempo reale.
"Tra queste percezioni, ci sono anche "feromoni virtuali" rilasciati da altri robot su tag RFID nell'ambiente urbano, » disse Alfeo. «Questi segnano il percorso più comodo da uno o più cassonetti non vuoti e dal deposito più vicino. Più importante, grazie al suo comportamento collettivo, lo sciame è in grado di auto-organizzarsi per indirizzare le aree con la maggior quantità di rifiuti, fornendo sempre una risposta efficace."
La progettazione di questa soluzione innovativa ha richiesto una vasta gamma di competenze e ha coperto diverse aree di competenza. Il team che lo ha sviluppato è quindi altamente interdisciplinare, con background in scienze della città, robotica bio-ispirata, e scienza dei dati.
"I membri del team specializzato in scienza della città hanno fornito il modello del robot utilizzato nello studio e si sono occupati della modellazione dello spazio urbano in GAMA, una piattaforma di simulazione multi-agente, "Ha detto Alfeo. "Gli esperti nella progettazione comportamentale di sciami di robot hanno realizzato e testato la logica dello sciame in un modello adeguatamente aumentato dell'ambiente urbano. Finalmente, l'analisi delle implicazioni di ogni scelta progettuale è stata supervisionata da data scientist altamente competenti."
Alfeo e i suoi colleghi hanno valutato il loro sistema a sciame per la gestione dei rifiuti e hanno scoperto che ha superato gli approcci esistenti. Il loro studio ha anche offerto preziose informazioni su come progettare e personalizzare al meglio i sistemi robotici dello sciame.
"Abbiamo dimostrato che uno sciame di robot auto-organizzati potrebbe portare a grandi miglioramenti nel contesto della gestione dei rifiuti, senza alcuna fonte di informazione esterna o conoscenza preliminare della domanda di smaltimento dei rifiuti, — disse Alfeo. — Inoltre, abbiamo fornito approfondimenti sulla progettazione di un tale sistema con l'obiettivo di bilanciare le sue due proprietà principali, questo è, la capacità esplorativa e la reattività dello sciame. Il primo può ridurre il verificarsi di bidoni della spazzatura pieni, mentre quest'ultimo aiuta a ridurre la quantità di rifiuti nell'ambiente urbano."
La ricerca condotta da Alfeo e dai suoi colleghi è un esempio affascinante e utile di come i sistemi di robotica a sciame potrebbero essere applicati all'interno degli ambienti urbani. I loro risultati sono molto promettenti, aprendo nuove interessanti possibilità che potrebbero essere ulteriormente esplorate in futuro.
"L'approccio proposto non è specifico per la gestione dei rifiuti e potrebbe essere testato in una serie di applicazioni diverse, come veicoli autonomi, " ha detto Alfeo. "Poiché in questo caso la sicurezza è un fattore critico, però, la progettazione di tale sistema dovrebbe includere ulteriori soluzioni specifiche, come la tecnologia blockchain."
© 2018 Science X Network














