Un'auto a guida autonoma si dirige nel bosco. Credito:Matthew Doude, CC BY-ND
I veicoli autonomi possono seguire le regole generali delle strade americane, riconoscere i segnali stradali e la segnaletica orizzontale, notando strisce pedonali e altre caratteristiche regolari delle strade. Ma funzionano solo su strade ben segnalate che vengono accuratamente scansionate e mappate in anticipo.
Molte strade asfaltate, anche se, hanno la vernice sbiadita, cartelli oscurati dietro alberi e incroci insoliti. Inoltre, 1,4 milioni di miglia di strade statunitensi - un terzo delle strade pubbliche del paese - non sono asfaltate, senza segnali stradali come segnaletica orizzontale o linee di arresto qui. Ciò non include miglia di strade private, passi carrai non asfaltati o percorsi fuoristrada.
Che cosa deve fare un'auto autonoma che segue le regole quando le regole sono poco chiare o inesistenti? E cosa devono fare i suoi passeggeri quando scoprono che il loro veicolo non può portarli dove stanno andando?
Contabilità per l'oscuro
La maggior parte delle sfide nello sviluppo di tecnologie avanzate comporta la gestione di situazioni poco frequenti o non comuni, o eventi che richiedono prestazioni oltre le normali capacità di un sistema. Questo è sicuramente vero per i veicoli autonomi. Alcuni esempi su strada potrebbero essere la navigazione in zone di costruzione, incontrando un cavallo e un calesse, o vedere graffiti che sembrano un segnale di stop. Fuori strada, le possibilità includono l'intera varietà del mondo naturale, come gli alberi sulla strada, inondazioni e grandi pozzanghere o persino animali che bloccano la strada.

deserto simulato, ambienti prativi e forestali generati dal simulatore di veicoli autonomi della Mississippi State University. Credito:Chris Goodin, Università statale del Mississippi, Autore fornito
Al Centro per i sistemi veicolari avanzati della Mississippi State University, abbiamo raccolto la sfida degli algoritmi di addestramento per rispondere a circostanze che non si verificano quasi mai, sono difficili da prevedere e complessi da creare. Cerchiamo di mettere le auto a guida autonoma nello scenario più difficile possibile:guidare in un'area di cui l'auto non ha conoscenza preventiva, senza infrastrutture affidabili come vernici stradali e segnali stradali, e in un ambiente sconosciuto dove è altrettanto probabile vedere un cactus come un orso polare.
Il nostro lavoro combina la tecnologia virtuale e il mondo reale. Creiamo simulazioni avanzate di scene all'aperto realistiche, che usiamo per addestrare algoritmi di intelligenza artificiale a prendere il feed di una telecamera e classificare ciò che vede, etichettare gli alberi, cielo, percorsi aperti e potenziali ostacoli. Quindi trasferiamo quegli algoritmi su un veicolo di prova a trazione integrale appositamente costruito e lo inviamo sulla nostra pista di prova fuoristrada dedicata, dove possiamo vedere come funzionano i nostri algoritmi e raccogliere più dati da inserire nelle nostre simulazioni.
Avvio virtuale
Abbiamo sviluppato un simulatore in grado di creare una vasta gamma di scene all'aperto realistiche in cui i veicoli possono navigare. Il sistema genera una gamma di paesaggi di diversi climi, come foreste e deserti, e può mostrare come le piante, arbusti e alberi crescono nel tempo. Può anche simulare i cambiamenti meteorologici, la luce del sole e la luna, e le posizioni precise di 9, 000 stelle.

Un dilavamento stradale, come si vede nella vita reale, sinistra, e in simulazione. Credito:Chris Goodin, Università statale del Mississippi, Autore fornito
Il sistema simula anche le letture dei sensori comunemente usati nei veicoli autonomi, come lidar e fotocamere. Questi sensori virtuali raccolgono dati che alimentano le reti neurali come preziosi dati di addestramento.
Costruire una pista di prova
Le simulazioni sono buone quanto le loro rappresentazioni del mondo reale. La Mississippi State University ha acquistato 50 acri di terreno su cui stiamo sviluppando una pista di prova per veicoli autonomi fuoristrada. L'immobile è ottimo per prove in fuoristrada, con pendenze insolitamente ripide per la nostra area del Mississippi – fino al 60% di pendenza – e una popolazione di piante molto diversificata.
Abbiamo selezionato alcune caratteristiche naturali di questa terra che prevediamo saranno particolarmente impegnative per i veicoli a guida autonoma, e li abbiamo replicati esattamente nel nostro simulatore. Ciò ci consente di confrontare direttamente i risultati della simulazione e i tentativi della vita reale di navigare nella terra reale. Infine, creeremo abbinamenti simili reali e virtuali di altri tipi di paesaggi per migliorare le capacità del nostro veicolo.

L'auto di Halo Project può raccogliere dati sulla guida e la navigazione su terreni accidentati. Credito:Beth Newman Wynn, Università statale del Mississippi, Autore fornito
Raccogliere più dati
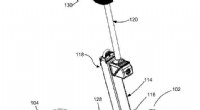
Abbiamo anche costruito un veicolo di prova, chiamato il progetto Halo, che ha un motore elettrico e sensori e computer in grado di navigare in vari ambienti fuoristrada. L'auto del progetto Halo ha sensori aggiuntivi per raccogliere dati dettagliati sui suoi dintorni reali, che può aiutarci a creare ambienti virtuali in cui eseguire nuovi test.
Due dei suoi sensori lidar, Per esempio, sono montati ad angoli intersecanti sulla parte anteriore dell'auto in modo che i loro raggi scorrano attraverso il terreno in avvicinamento. Insieme, possono fornire informazioni su quanto sia ruvida o liscia la superficie, oltre a catturare letture da erba e altre piante e oggetti sul terreno.
Abbiamo visto alcuni primi risultati entusiasmanti dalla nostra ricerca. Per esempio, abbiamo mostrato risultati preliminari promettenti che algoritmi di apprendimento automatico addestrati su ambienti simulati possono essere utili nel mondo reale. Come per la maggior parte delle ricerche sui veicoli autonomi, c'è ancora molta strada da fare, but our hope is that the technologies we're developing for extreme cases will also help make autonomous vehicles more functional on today's roads.
Lidar beams intersect, scanning the ground in front of the vehicle. Credit:Chris Goodin, Mississippi State University, Autore fornito
Questo articolo è stato ripubblicato da The Conversation con una licenza Creative Commons. Leggi l'articolo originale.