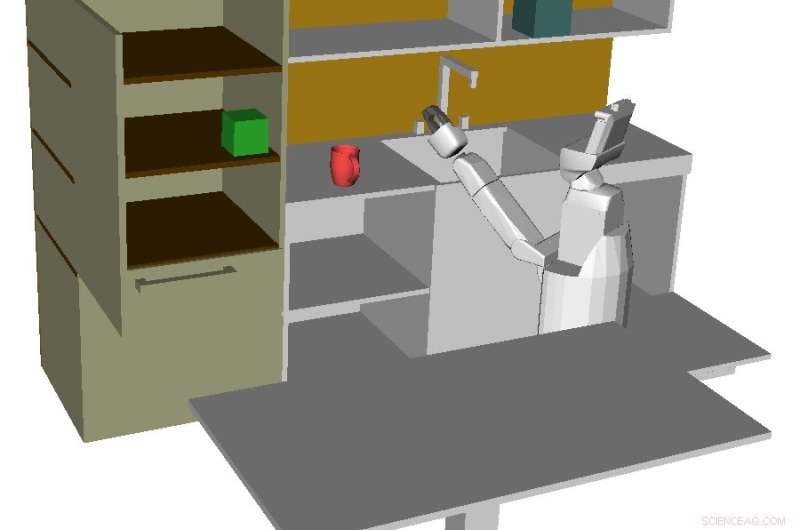
Ambiente di simulazione per un robot in cui i ricercatori hanno testato il loro algoritmo. Credito:Dai et al.
I ricercatori del Computer Science and Artificial Intelligence Laboratory del MIT hanno recentemente sviluppato un sistema di pianificazione del movimento vincolato alla possibilità che può essere applicato a robot ad alto grado di libertà (DOF) in condizioni di incertezza del movimento e in caso di informazioni di stato imperfette. Il loro approccio, delineato in un documento pre-pubblicato su arXiv, può trovare traiettorie fattibili che soddisfano un limite specificato dall'utente sulla probabilità di collisione.
"L'ispirazione principale di questo lavoro è la limitazione dei pianificatori di movimento vincolati al caso esistenti, "Siyu Dai, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Ho scoperto che molti pianificatori di movimento all'avanguardia richiedono la formulazione di ostacoli in forme convesse, che è impossibile per la pianificazione in domini ad alta dimensionalità, per esempio la pianificazione del movimento del manipolatore. Altri tradizionali pianificatori di movimento vincolati al caso si basano su metodi ad albero casuale a rapida esplorazione (RRT), di cui la velocità nel compito di pianificazione ad alta dimensione è molto preoccupante."
Per affrontare i limiti dei sistemi di pianificazione del movimento esistenti, Dai e i suoi colleghi hanno deciso di sviluppare un pianificatore di movimento rapido e vincolato al caso. Un simile pianificatore di movimento sarebbe particolarmente utile per i robot che completano compiti soggetti a gravi disturbi e osservazioni limitate, come la manipolazione subacquea.
Chekov probabilistico (p-Chekov), il sistema che hanno creato, si basa sul loro precedente lavoro nella pianificazione deterministica del movimento, che ha integrato l'ottimizzazione della traiettoria in un quadro di roadmap sparso. P-Chekov utilizza un approccio di pianificazione del movimento gaussiano lineare-quadratico per stimare la distribuzione di probabilità dello stato di un robot. Quindi applica le teorie della quadratura alle stime del rischio di collisione dei waypoint e adatta gli approcci di allocazione del rischio per assegnare le probabilità consentite di guasto ai waypoint.
"Il sistema di pianificazione del movimento vincolato al caso sviluppato nel nostro documento include una componente di pianificazione deterministica e una componente di valutazione del rischio, " Dai ha spiegato. "La componente deterministica prima costruisce una tabella di marcia composta da fattibili, bordi liberi da collisioni in base alle informazioni sull'ambiente. Nelle attività di pianificazione online, quindi cerca una traiettoria fattibile dalla roadmap e la leviga con un ottimizzatore di traiettoria. Questa traiettoria viene quindi trasferita alla componente di valutazione del rischio, che valuta il rischio di collisione in base alla stima dei rumori."
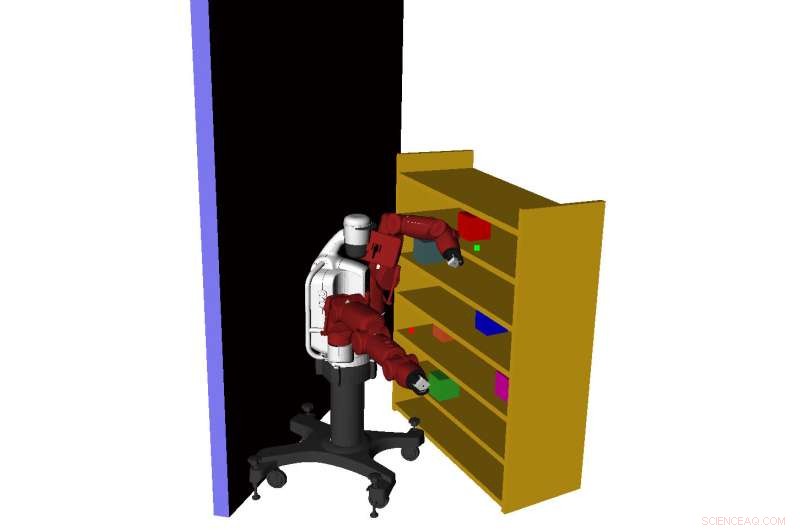
Ambiente di simulazione per un robot in cui i ricercatori hanno testato il loro algoritmo. Credito:Dai et al.
Se il rischio di collisione calcolato dal componente di valutazione del rischio di P-Chekov viola il vincolo di probabilità predefinito, la traiettoria viene restituita al pianificatore deterministico e vengono aggiunti nuovi vincoli, per trovare una traiettoria a minor rischio. Se il rischio di collisione soddisfa il vincolo di probabilità, il sistema esegue semplicemente la traiettoria proposta.
Contrariamente agli attuali pianificatori di movimento consapevoli del rischio, P-Chekov può essere applicato a compiti di pianificazione robotica ad alto DOF, senza dover formulare ostacoli in forme convesse. Nei test di simulazione, il sistema ha ridotto efficacemente i rischi di collisione e soddisfatto i vincoli di possibilità specificati dall'utente negli scenari di pianificazione del mondo reale comunemente incontrati dai robot ad alta dimensionalità.
"Abbiamo stabilito un sistema di pianificazione del movimento con vincoli di possibilità che può incorporare attività di pianificazione del movimento ad alta dimensione, "Ha detto Dai. "Ciò significa che la pianificazione del movimento vincolata dal caso non è più limitata alle attività di tipo di guida, ma ora può essere applicato a robot mobili con braccia, per esempio robot di supporto umano e manipolatori subacquei, che può fare piani basati su diversi requisiti di livello di rischio."
Nel futuro, P-Chekov potrebbe essere applicato a una varietà di robot ad alta dimensionalità, migliorare la loro pianificazione del movimento in condizioni di incertezza. Nonostante i suoi promettenti risultati, gli esiti della fase di progettazione del sistema possono talvolta essere eccessivamente conservativi, a causa di allocazioni del rischio non ottimali e di un numero limitato di nodi di quadratura.
Nelle prove preliminari, i ricercatori hanno già iniziato a valutare tecniche che potrebbero migliorare l'utilità del sistema. Nel frattempo, stanno anche progettando di migliorare l'algoritmo di stima della probabilità di collisione di P-Chekov, per potenziare ulteriormente la sua capacità di evitare i conflitti.
"La direzione principale dei nostri prossimi studi sarà migliorare l'algoritmo di valutazione del rischio al fine di accelerare l'intero processo di pianificazione del movimento e rendere il pianificatore reattivo rapidamente, "Dì disse.
© 2018 Science X Network